本文报道了一种高度可控和可编程的自组装工艺,使用微流控技术批量制造的各向异性微马达在全区域红外辐照下实现多模态运动。其中单个微马达表现出平移和公转模式,而其自组装结构则表现出额外的自转运动,通过定制自组装结构可以实现心仪的运动模式。
具有多种运动模式的光驱动微马达比单模式微马达具有更大的应用潜力。例如,线性或曲线运动在货物运输中表现出潜力,而旋转运动的周期性和连续性则有利于齿轮传动或小规模混合。然而,实现这种多功能性往往需要复杂的结构设计和精确的光聚焦策略,这增加了系统的复杂性和成本,同时也对精确的动态操作和微尺度任务提出了挑战。近日,香港城市大学机械工程系朱平安课题组报道了一种简便的、无需精确的光聚焦策略实现多模态运动的微马达系统,通过微流控技术批量生产出各向异性微马达,在全区近红外照射下,单个微马达在水面上展现出平移和公转运动。此外,通过毛细相互作用形成的自组装结构显示出额外的自转运动。该自组装过程表现出高度可控性和可编程性,有望推动以多模态的单个微马达作为基础构件实现各种智能自推进系统的发展。相关工作以 Programmable assemblies of photothermal anisotropic micromotors for multimodal motion 为标题发表在Materials Horizons上。
单个微马达的运动

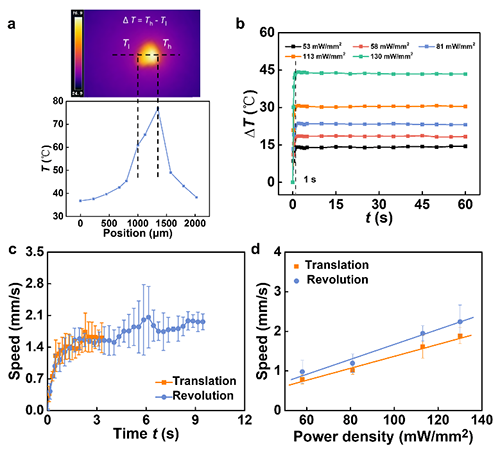
图2.微马达周围产生的温度场
微马达的可控自组装

图3.微马达的自组装机理和特性

图4.多个微马达的自组装行为
自组装超结构
当微粒数量达到10个时,自组装结构大致保持链状形态。然而,随着数量增加到20、30、40和50时,结构转变为由多个支链组成的分形超结构,且相同数量的微粒所形成的结构具有相似的特征半径。此时产生的超结构的尺寸大于NIR尺寸,只有暴露在NIR照射下的微粒才能将光转化为热能以驱动运动(图5d)。因此,可以将超结构的不同部分暴露于NIR照射下来调整运动的方向、轨迹甚至模式。

图5. 超结构自组装组件的特性
论文信息
Wenchang Zhao, Shiyu Wang, Ying Zhou, Yanhong Li, Shuxian Tang, Yutong Zheng & Pingan Zhu*. Programmable assemblies of photothermal anisotropic micromotors for multimodal motion. Materials Horizons, doi: 10.1039/D4MH01346H (2025).
链接:https://pubs.rsc.org/en/Content/ArticleLanding/2025/MH/D4MH01346H
