近年来,受软体动物的启发,新型柔性执行器的研究引起了人们的广泛关注。该材料可以在外部刺激下改变形状,这使得它们在软体机器人以及其他智能器件中有着广泛的应用。为了实现软体机器人中安全可靠的人机交互界面,该材料性能需要满足一系列的要求:(1) 温和的,对人体安全的形变刺激源,比如可在接近于人体温度37°C激发;(2) 柔性执行器在温和的刺激源下可产生优异的形变性能;(3) 柔性执行器需要有类似于人体皮肤组织的低杨氏模量;(4) 并且希望柔性执行器拥有卓越的抗撕裂性能,即使受到损伤,裂纹也不会扩展。
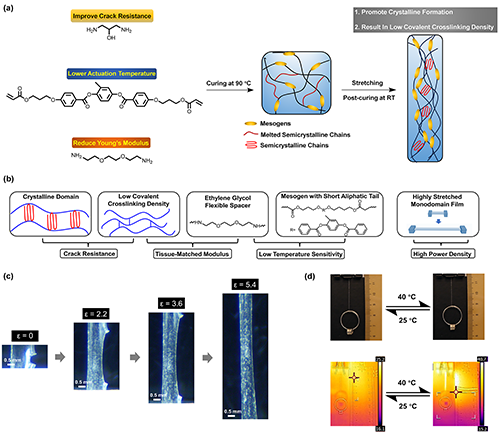
Figure 1. 柔性执行器的设计和制备 (a, b), 抗撕裂性能展示(c) 以及在低温(d)下产生大功率密度。
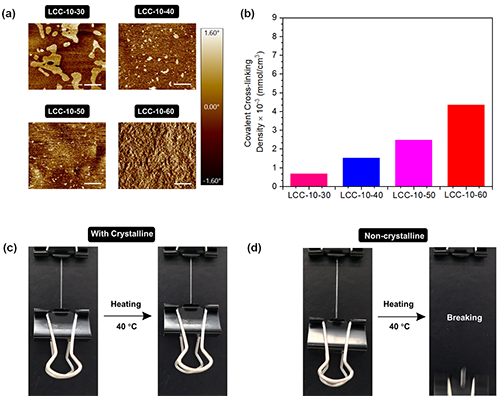
为了实现优异的抗撕裂性能,作者认为其关键点在于精确的控制液晶网络的结晶以及交联结构。作者首先将含有可反应性液晶基元,2,2''-(乙烯二氧)双(乙胺)以及1,3-二氨基-2-丙醇(提供可结晶链段)的DMF混合溶液在90°C高温下加热一定的时间,产生轻度共价交联网络。然后放在室温下放置两天。在这个过程中,由于仲氨和丙烯酸酯双键的反应速率大大降低,形成的高分子网络拥有较低的共价交联度。同时,高分子链段可以很好得形成结晶区。研究结果表明,随着预加热时间的增加,材料的结晶度大幅度降低以及共价交联度大大提高 (Figure 2a,b),这将不利于实现优异的抗撕裂性能。
通过精确的控制材料结构,他们成功制备了拥有高撕裂能(33720 J m-2),高疲劳阈值(2250 J m-2),以及类似于皮肤模量 (0.7 MPa)的柔性执行器。作者还进一步设计实验证明了结晶链段在增强驱动性能方面的重要作用。从Figure 2c,d中我们可以看出,对于不含有结晶链段的柔性执行器,当温度升高到40°C时候,材料将无法承受重物而断裂。然而,拥有结晶链段的柔性执行器却可以在温度刺激下举起自身3000倍重量的物体。并且,柔性执行器可在40°C驱动下产生大功率(450 W kg-1),这一点对于实现柔性执行器在生物医药器件领域的应用至关重要。该论文近期发表在先进材料上。
原文链接: https://onlinelibrary.wiley.com/doi/10.1002/adma.202402278
作者简介:

蒋臻博士,本文第一作者和通讯作者。现为卧龙岗大学澳大利亚优秀青年基金获得者(ARC DECRA Fellow)。曾师从复旦大学俞燕蕾教授,2019年博士毕业于澳大利亚昆士兰大学。主要研究方向是智能形变高分子材料的设计,合成以及应用。迄今为止,发表17篇第一作者论文,比如Science, Adv. Mater., Angew. Chem., J. Am. Chem. Soc., Adv. Funct. Mater., Adv. Sci., Chem. Mater. 等。

Prof. Geoff Spinks received his PhD from the University of Melbourne in 1990 for his work on the mechanical behaviour of polymers and he has maintained a research interest in this area specialising in mechanical actuator materials (artificial muscles). Geoff is currently Senior Professor and Head of School in the School of Mechanical, Materials, Mechatronic and Biomedical Engineering at the University of Wollongong, Australia. Geoff has published over 250 journal articles detailing the development and properties of a range of materials including conducting polymers, carbon nanotubes, hydrogels, liquid crystal elastomers and twisted and coiled polymer fibers. His current interests include new product development and new manufacturing methods (such as 3D printing) that utilise his artificial muscle materials.
- 哈佛大学锁志刚教授团队 Nat. Commun.:弹且韧的物理结构域交联超长链水凝胶 2025-05-23
- 澳大利亚沃隆港大学蒋臻与合作者《Adv. Mater.》:一种人体温度驱动高形变率高功率密度柔性执行器 2025-12-06
- 浙大赵朋/张承谦课题组 Addit. Manuf.:磁场辅助增材制造柔性驱动器 2024-02-06
- 暨大刘明贤教授团队:基于非对称PVA/C/PE双层膜的光驱动柔性执行器和多功能传感器 2023-10-01
