磁控柔性执行器具有无线操控、快速相应的优势特点,在近年来收到广泛关注。磁性柔性致动器通常由柔性材料基体和嵌入其中的磁性颗粒组成。当磁性颗粒为硬磁性颗粒时,由于其能保持其剩磁强度,在驱动磁场下能够产生磁矩驱动致动器形成内部变形。这类执行器的功能多样性取决于其空间结构与磁化排布设计,与制造方法紧密相关。增材制造方法为磁性驱动器的制造提供了全新的思路,通过与辅助磁场的结合,实现在制造过程中对材料的磁化方向进行排布,进而实现对材料内部的磁排布设计。但现有研究中大多未能实现同时具有三维空间结构与磁排布的柔性执行器。另外,基于光固化的增材制造方法对材料透光性有要求,材料的磁含量受限,会引起磁致形变的不足。这些问题限制了磁性柔性执行器的设计创新与功能拓展。

针对上述问题,浙江大学赵朋教授/张承谦博士课题组报道了一种磁场辅助DLP光固化制造方法,用于制造具有三维结构和三维磁排布的磁控柔性执行器。在制造过程中,辅助磁场可使硬磁性颗粒对齐,从而获得各向异性磁化排布。DLP方法具有制造精细结构和选择性固化的能力,使构造复杂磁排布设计成为可能。为了解决磁粉含量低导致驱动力不足的问题,该研究发挥该制造方法的多层打印能力,构建了凹槽结构,以增强执行器的变形能力,并展示了具有抓取、爬行、泵水等功能的磁性柔性制动器,体现了该方法在磁控柔性执行器的设计与功能拓展方面的巨大潜力。相关研究成果以“Magnetic Field-Assisted Manufacturing of Groove-Structured Flexible Actuators with Enhanced Performance”为题发表在《Additive Manufacturing》上,浙江大学机械工程学院赵朋教授和交叉力学中心张承谦博士为论文共同通讯作者,硕士生孙浩南为论文第一作者,论文作者团队成员均来自浙江大学流体动力基础件与机电系统全国重点实验室。
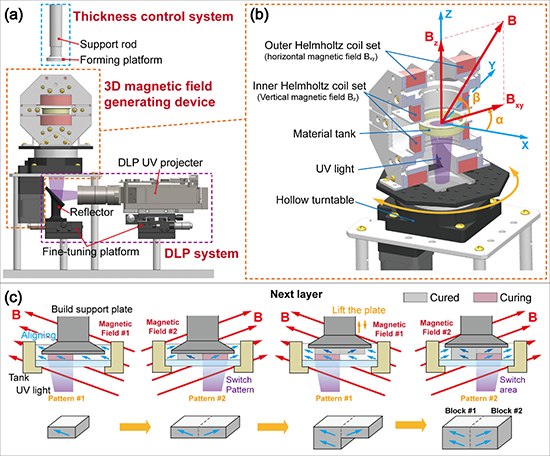
图1 磁场辅助制造装置与制造流程示意图
因为DLP方法是基于光固化原理,对材料有透光性要求,磁颗粒含量只能保持在较低的水平,这会导致磁驱动效果变差,影响磁控驱动器的功能实现。为应对这一问题,该研究通过构造凹槽结构以强化形变效果。充分发挥制造方法的多层打印能力,在磁排布区域的中心部分进行叠层,在不同磁排布区域的交界处保留较小的厚度,将形变集中在需要形变的地方。

图2 凹槽结构的构造以及对形变的影响
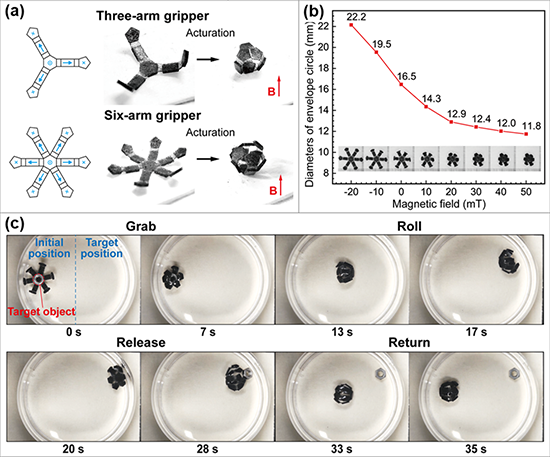
图3 多臂抓手以及运输物体应用展示
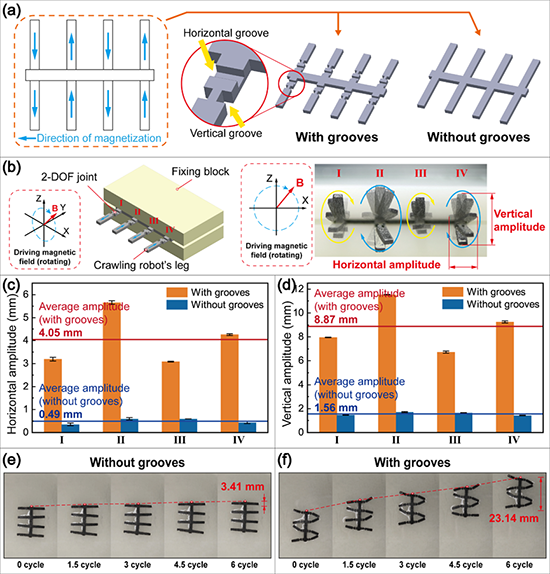
图4 凹槽结构组成的二自由度关节强化爬行机器人的运动能力

图5 磁性微流隔膜泵
原文链接:https://doi.org/10.1016/j.addma.2024.103979
课题组主页:https://person.zju.edu.cn/pengzhao
- 同济大学/喀什大学马杰教授团队 Small:原位磁场辅助双网络凝胶高选择性回收贵金属 2024-09-03
- 浙江大学郑强、吴子良团队 Angew:旋转磁场辅助制备具有多响应性、复杂取向结构的纳米复合水凝胶 2022-06-27
- 中科院福建物构所官轮辉研究员团队 CEJ:DLP光固化打印具有高导电、机械强度和自愈合的离子弹性体 2022-11-17
- 港中大张立教授课题组联合港理大、港中大医学院《Sci. Adv.》:亚毫米磁控微导管技术用于提升血管内介入可达性和治疗效率 2025-06-23
- 武汉理工戴红莲、涂溶/华山医院陈天午 AFM:韧带修复者的福音 - 一种人工韧带制备的新方法 2024-10-14
- 华科大李亮教授、曹全梁教授团队 Nat. Commun.:微型磁控胶囊机器人实现多模态响应与多功能集成 2024-03-12
- 澳大利亚沃隆港大学蒋臻与合作者《Adv. Mater.》:一种人体温度驱动高形变率高功率密度柔性执行器 2025-12-06
