软体驱动器在软体机器人,传感器,智能控制,人工智能和视觉智能领域受到了广泛的关注。通过拉伸、收缩、和扭转变形的组合,可以实现不同类型的运动,例如弯曲,滚动和跳跃。软体机器人需要柔性驱动器,例如通过人工肌肉举起或移动物体来执行某些工作。另外,在高级智能系统的开发中,还需要集成感知、信号传输和控制功能的驱动器,这进一步激发了对多功能驱动器的需求。
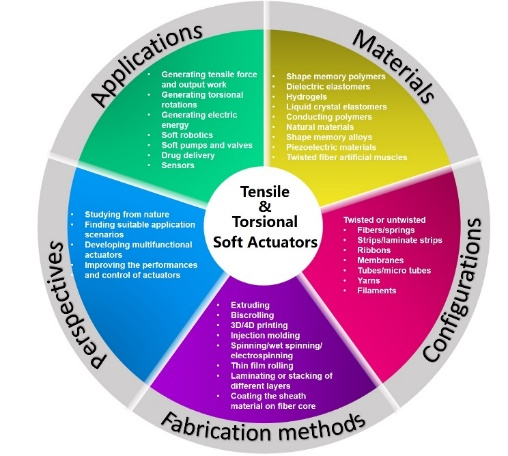
南开大学刘遵峰教授等人最近在《Advanced Functional Materials》上发表的综述“Progresses in Tensile, Torsional, and Multifunctional Soft Actuators”,总结了可以执行拉伸和扭转驱动的各种类型的软驱动器,包括加捻纤维、形状记忆高分子、水凝胶、液晶高分子、导电聚合物以及天然材料等。此外,该综述还列举了用于可以实现提升物体的弯曲或滚动变形的驱动器的示例,并且总结了有关多功能柔性驱动器结合传感和信号传输功能的最近报道。最后,该综述总结了各种驱动器的优缺点以及挑战,包括可以实现拉伸和扭转驱动的不同方式,不同的材料以及用于提升或移动物体的设计,以及具有驱动和感应功能的多功能驱动器的构造。
1、纤维人工肌肉
具有捻曲结构的纤维人工肌肉可以通过对纤维加捻来产生拉伸和扭转驱动,而将该加捻纤维盘绕成弹簧状则可以增大其伸缩驱动的行程。该部分首先总结了纤维人工肌肉的驱动机制,而后列举并讨论了通过不同刺激(例如热、溶剂吸收或渗透、电化学、和光刺激等)驱动的纤维驱动器。

△热膨胀驱动的加捻纤维人工肌肉。 图A为捻曲纤维人工肌肉及其前体尼龙6,6单丝的光学图像。图B为热驱动双压电晶片纤维人工肌肉的热拉伸过程。图C为用于拉伸和扭转致动的捻曲纤维人工肌肉的结构。从左到右分别是伸缩驱动的扭转固定螺旋纤维,可逆扭转驱动的扭转固定捻曲纤维,不可逆扭转驱动的非固定加捻纤维,以及不可逆中间扭转驱动的纤维。图D为镍钛合金丝人工肌肉的工作机制示意图。纤维底部黄色部分为镀金的镍钛合金丝。
2、形状记忆高分子
形状记忆高分子是驱动器中一类重要的组成部分,可以显示出拉伸和扭转驱动。通过预变形及升温固定聚合物链,可以设定聚合物的暂时形状;升温使聚合物链重新激活,形状恢复为变形前的形状。形状记忆高分子可以显示单向和双向驱动,具体情况取决于不同结构设计产生的可逆或不可逆的交联点。
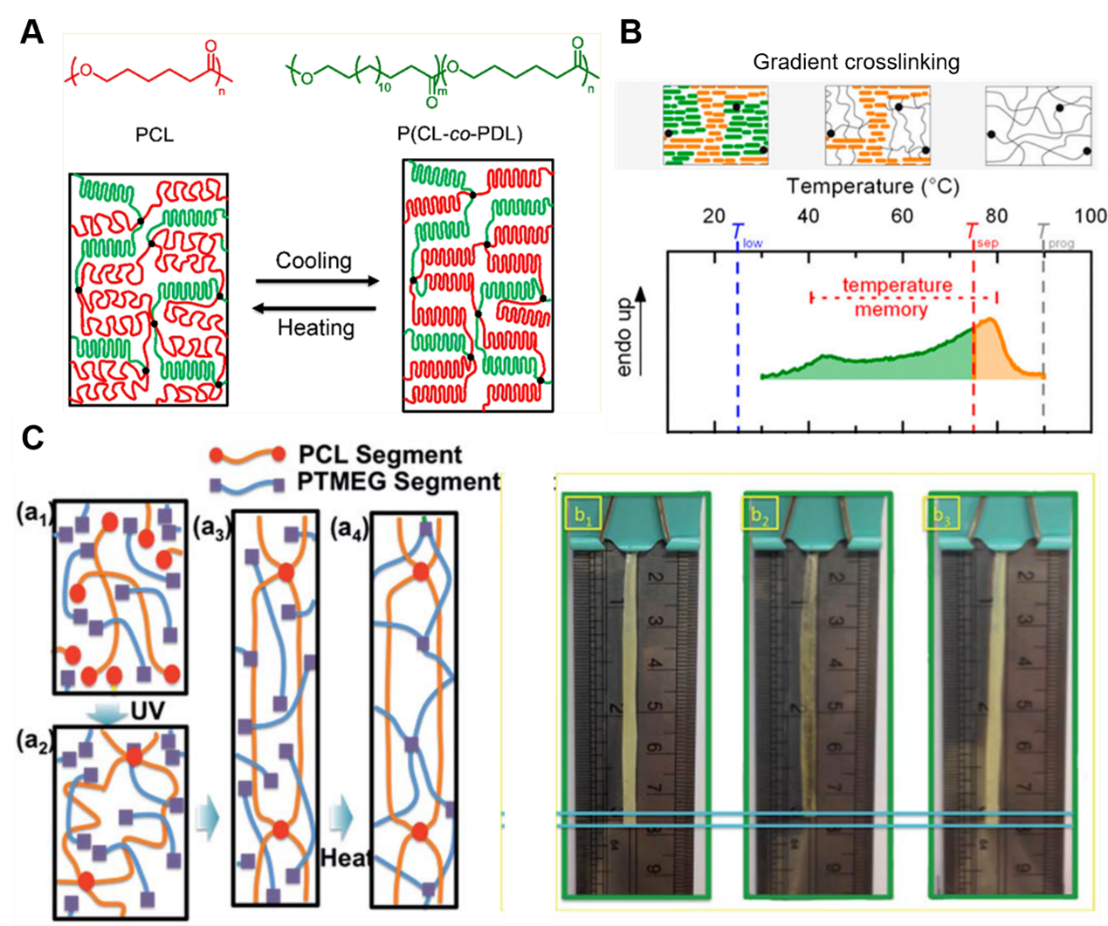
△形状记忆高分子及其在人工肌肉中的应用。 图A为由两种具有不同熔融温度的聚合物构成的物理交联形状记忆高分子。图B为具有cPEVA(交联聚乙酸乙烯酯)的形状记忆高分子具有宽熔融温度范围,可以提供梯度交联。图C为由PCL(聚己内酯)和PTMEG(聚四亚甲基醚二醇)构建的具有互穿网络的形状记忆高分子。
3、介电弹性体驱动器
介电弹性体驱动器是一种由电活性聚合物薄膜构成的驱动器,具有变形速度快、驱动应变大、轻便等优势,在软体机器人领域有着广泛的应用前景。通过在介电聚合物薄膜两侧的电极上施加电压,在静电吸引力的作用下沿膜厚度方向压缩,同时膜横向尺寸增大。堆叠多层聚合物薄膜或使用管状结构及“弹簧辊”结构可以放大驱动行程、实现伸缩驱动,并提供较大的驱动力。

△拉伸和扭转驱动的介电弹性体驱动器。 图A为单轴预应力硅树脂薄膜的线性驱动示意图。图B为将预拉伸的薄膜卷成螺旋弹簧轴的示意图,该膜单轴驱动长度随响应电压的变化而变化。图C为管状介电弹性体驱动器的单向延伸。图D为CNT@rubber@CNT@fiber介电弹性体扭转驱动器的示意图及其扭转驱动、拉伸驱动以及驱动速度与加捻密度的关系。图E为堆叠的多层介电弹性体驱动器。
4、水凝胶材料
水凝胶因其柔软的特点在软体机器人应用中具有巨大前景。作为一种重要的刺激响应材料,可以在如温度、pH等外部刺激下产生形状变化。这种形变是由于聚合物链的形态变化导致在溶剂中的溶解度改变而引起的。最近的研究发现,其他类型的刺激,例如湿气、溶剂和磁场也可使水凝胶产生驱动。

△热响应的拉伸和扭转水凝胶驱动器。 图A为用于加热驱动的双层PNIPAM-PAA/ SA(聚(N-异丙基丙烯酰胺)-聚丙烯酸/海藻酸钠)弹簧纤维线圈的示意图,可分别实现收缩和伸长驱动。图B为纳米片之间的静电力作用示意图。
5、液晶高分子
液晶高分子是一种重要的驱动器,也可以完成拉伸和扭转驱动,这是通过在热或光驱动时从向列相转变为各向同性相来实现的。驱动前通过多种方式(包括拉伸取向、表面取向等)对液晶高分子前体进行加工,可以实现液晶高分子的热/光驱动的伸缩或扭转。液晶高分子还显示出不可逆和可逆的致动,取决于是否存在驱动期间不会被破坏的其他交联网络。

△可旋转及伸缩的液晶高分子驱动器。 图A为三明治结构的液晶弹性体膜组成的管状驱动器的驱动示意图。图B为用液晶弹性体墨水热直写制备液晶弹性体材料的示意图。图C为对液晶弹性体前体同时进行“焊接”和“取向”,以获得具有复杂3D结构和驱动变形的液晶弹性体驱动器。
6、导电聚合物
导电聚合物可以作为电化学驱动器。当给聚合物施加电压时,它展现出可逆的伸长驱动行为,当移除电压时又可以恢复原状。使用不同类型和结构的导电聚合物可以提升驱动器的驱动行程,驱动力和做功能力。导电聚合物纤维也可以用来设计可穿戴的人工肌肉纺织品。

△导电聚合物驱动器。 图A为导电聚合物致动机制的示意图。图B为PPY / DBS(聚吡咯/十二烷基苯磺酸)纤维驱动器在还原态和氧化态之间径向膨胀和收缩的示意图。图C为导电织物驱动器的图示以及通过杠杆臂提升负载的应用。该纺织品是由涂有导电聚合物的纤维素纱线制成的。
7、天然材料
除了合成材料,一些天然材料在受到外部刺激的时候(主要是湿度影响)也可以产生拉伸和扭转驱动,比如蜘蛛丝和蚕丝等。对于蜘蛛丝来说,扭转驱动依赖于天然纤维材料内部的扭转结构,与此同时它还表现出可逆和不可逆的伸缩驱动。蜘蛛丝暴露在湿气中可以观察到不可逆的超收缩现象,同时由吸收水分造成的体积膨胀也可产生可逆驱动。利用蜘蛛丝的“固-液”过渡效应可以设计一种可逆驱动,蜘蛛丝在这个过程中会在液滴中弯曲并收缩成线圈。
8、多功能驱动器
文章在这一部分总结了能够监测形变时变形大小的多功能驱动器的进展。拉伸和弯曲驱动器都可以与应变传感器集成在一起,通过感应电阻或者电容的大小测量驱动应变。驱动产生的形变改变了应变传感器的电阻或者电容,从而改变输出的电信号,实现测量。
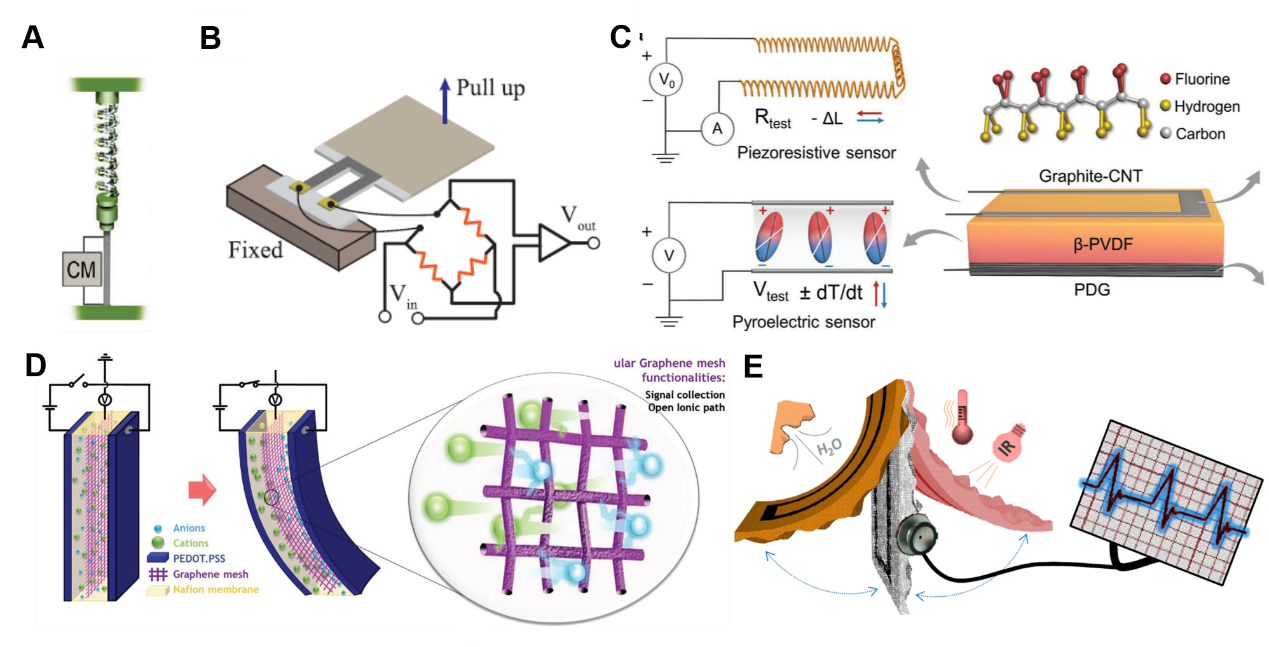
△集成了应变感应功能的多功能驱动器。 图A为使用可拉伸的CNT@rubber@CNT@fiber电容型应变传感器,测量高分子螺旋纤维人工肌肉的应变的示意图。图B为基于纸张的磁响应驱动器的示意图。图C为光驱动多传感式graphite/ CNT / PVDF / PDG(石墨/碳纳米管/聚偏氟乙烯/聚多巴胺还原氧化石墨烯)薄膜驱动器的示意图。图D为石墨烯微管网集成自感应离子柔性驱动器的示意图。图E为湿度驱动的单层氧化石墨烯驱动器的示意图,其中用于应变传感的还原氧化石墨烯线通过激光还原氧化石墨烯得到。
文章在最后一部分中还举例说明了拉伸和扭转人工肌肉在未来的可能应用,例如可用来举起物体或与人造骨骼和关节连接。 此外,人工肌肉还可以用于运输和混合液体或用作发电机或传感器,该综述有助于读者通过跨学科研究,实现不同类型的驱动器来提供更多的可能。
原文链接:https://doi.org/10.1002/adfm.202007437
- 巴黎高科化学学院李敏慧教授 AFM 综述:电刺激响应液晶弹性体作为软驱动器 2025-11-14
- 中国科大龚兴龙教授团队《ACS Nano》:具有可维持塑性变形和可编程磁驱形状恢复的三响应软驱动器 2023-12-05
- 浙江大学赵骞教授团队《Nat. Commun.》:变形模式可编程的高速水凝胶软驱动器 2023-11-26
- 清华大学杨忠强课题组《Adv. Mater.》:开发液晶弹性体旋转微引擎 2021-12-31
- 天工大张佳玮教授课题组 AFM:宽温域高阻尼形状记忆高分子水凝胶 2026-05-28
- 天工大张佳玮教授课题组 Macromolecules: 利用α-甲基调控形状记忆高分子水凝胶的形变速度 2024-08-29
- 长期有效 | 西南交大周绍兵教授团队诚招博士、推免硕士 - 材料、生物医学工程 2023-09-23
