刺激响应水凝胶是一类典型的变形软材料,能够响应不同的环境刺激而改变凝胶内部的渗透压,并通过溶胀/去溶胀实现可逆的宏观体积变化。近年来,该类智能材料因其丰富的响应类型和变形模式,在人工肌肉、药物递送、组织培养等应用领域受到广泛关注。然而现有凝胶依赖于渗透压推动的传质扩散过程引起变形,该机制从根源上限制了其响应速度,通常需要几分钟到几小时才能完成一次驱动循环。另一方面,水凝胶的变形模式在合成制备后即被确定,无法进一步改变,难以适应复杂多变的实际应用场景。

针对上述问题,浙江大学赵骞教授团队报道了一类兼具高响应频率和可编程能力的新型水凝胶软驱动器,可在红外光下实现多模态高频驱动。该成果以“High speed underwater hydrogel robots with programmable motions powered by light”为题发表在Nature Communications上。论文的第一作者为倪楚君博士,通讯作者为赵骞教授。该工作得到了国家重点研发计划和自然科学基金的支持。

图1 PNIPAM-BISS各向异性水凝胶致动器的分子构成及编程机理。(a)水凝胶前驱液的组分;(b)水凝胶编程宏观展示;(c)水凝胶编程过程及机理示意
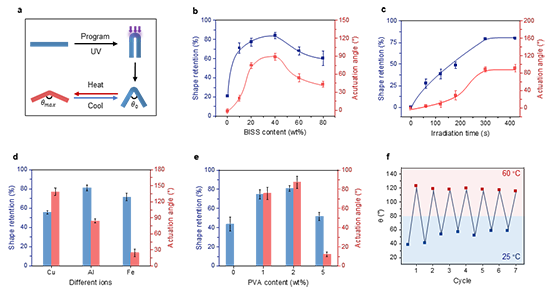
图2 PNIPAM-BISS水凝胶形状重构及驱动的影响因素。
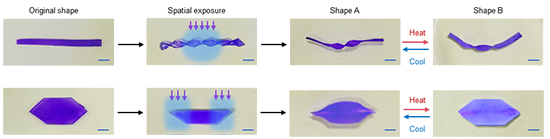
图3 空间选择性编程PNIPAM-BISS各向异性水凝胶

图5 高频红外驱动器
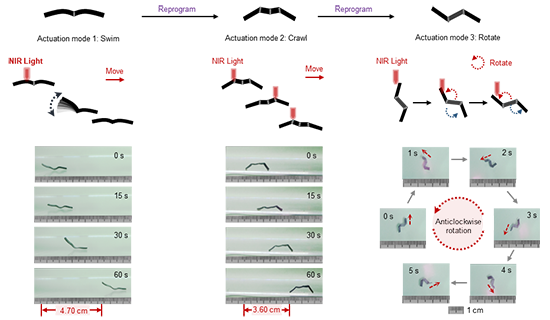

图6 高速水凝胶游泳机器人(左);爬行机器人(中);旋转机器人(右)
原文链接:https://www.nature.com/articles/s41467-023-43576-6
- 中科大刘世勇教授、胡进明教授/宾夕法尼亚大学Dennis Discher教授 JACS:化学能与光能驱动刚性聚合物囊泡的可编程机械形变 2026-07-17
- 浙江大学赵骞教授、浙江省肿瘤医院张宇华团队 Adv. Mater.:在可编程的自发变形水凝胶方面取得进展 2026-07-12
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 西安交大李涤尘/贺健康教授团队 Adv. Mater.:水凝胶 “拉一拉” - 实现细胞有序排列 2026-07-23
- 青岛大学隋坤艳、范汶鑫/宁波材料所陈涛 Angew:聚合动力学调控拓扑缠结实现水凝胶高对比度3D自变形 2026-07-21
- 长春工大刘鑫、张钦课题组 Angew:一种兼具高机械强度与高锌离子迁移率的可回收超分子水凝胶电解质用于稳定锌负极 2026-07-13
- 巴黎高科化学学院李敏慧教授 AFM 综述:电刺激响应液晶弹性体作为软驱动器 2025-11-14
