东北大学田野团队 NML:仿生多功能自感知驱动的梯度水凝胶用于软硬机器人的远程交互
2024-01-10 来源:高分子科技
大自然为软机器人的发展提供了大量灵感。许多生物,如人类的舌头、水母的触手和含羞草的叶子,不仅可以在大范围内灵活形变,而且具有自我感知能力。为了模拟这些自然系统,研究人员通过结合软致动器和柔性传感器来开发仿生软机器人。然而,一个普遍的限制是大多数软致动器虽然能够形成复杂的形状,但缺乏感知外部刺激和监测自身运动的能力,而直接嵌入传感器容易导致软机器人设计和制造的复杂性增加,在环境交互中的应用中受到阻碍。因此,开发一体化仿生多功能自感知软机器人已成为一个引人注目的课题。
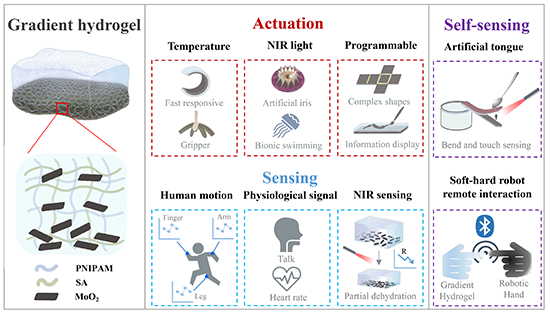
图1. 自感知驱动梯度水凝胶的合成、性能和应用示意图
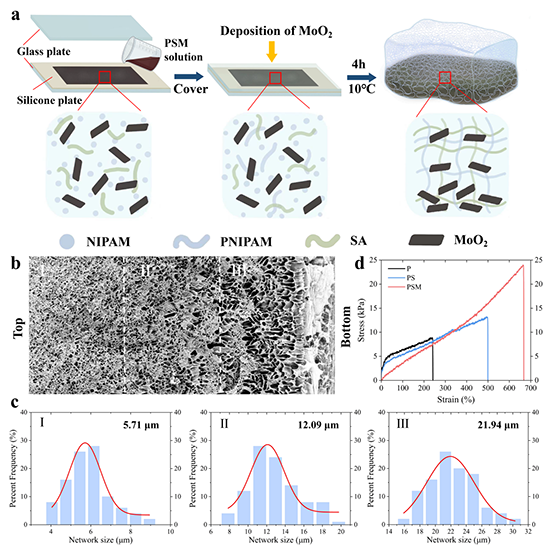
图2. PSM水凝胶的合成与表征
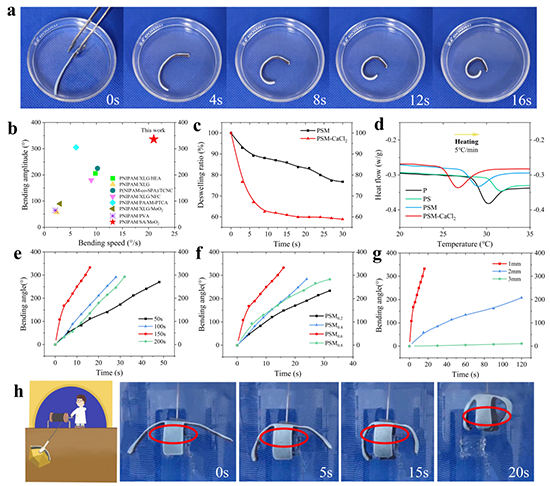
图3. PSM水凝胶的热响应驱动
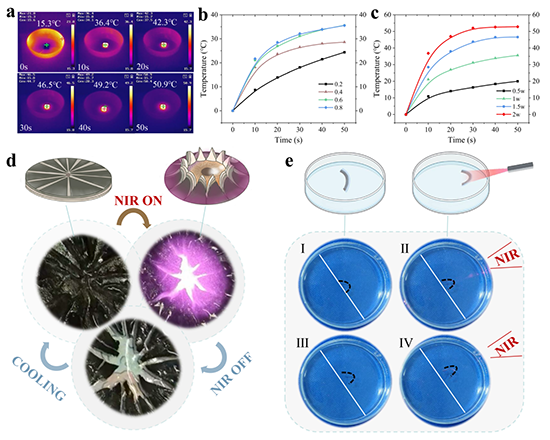
图4. PSM水凝胶的光响应驱动

图5. PSM水凝胶的可编程变形和信息显示
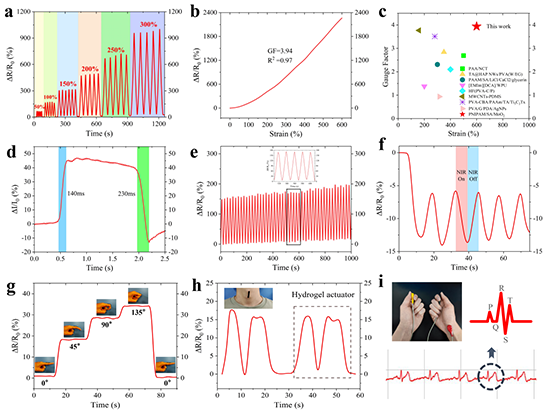
图6. PSM水凝胶的传感性能
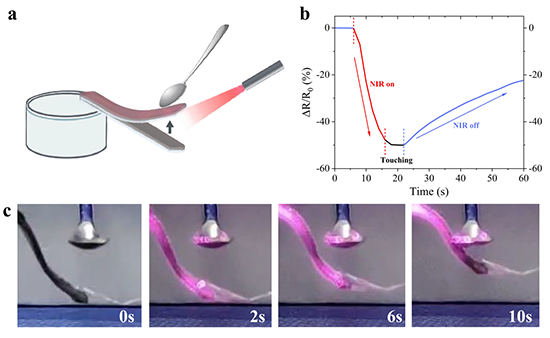
图7. 自感知仿生人工舌头

图8. 软硬机器人远程交互系统
该研究工作以“Bioinspired Multifunctional Self-Sensing Actuated Gradient Hydrogel for Soft-Hard Robot Remote Interaction”为题发表在国际知名学术期刊《Nano-Micro Letters》(影响因子:26.6)。东北大学博士研究生刘赫为论文第一作者,崔笑宇副教授和田野副教授为论文共同通讯作者。
原文链接:https://doi.org/10.1007/s40820-023-01287-z
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 陕科大强涛涛、任龙芳教授团队 AFM:具有应变传感和溶剂触发报警的双模态仿生自修复聚氨酯基离子凝胶传感器 2026-06-22
- 郑大米皓阳教授、湖南工大经鑫教授 AFM:集成驱动与应变传感功能的梯度水凝胶 - 用于仿生机器人 2025-12-02
- 武汉大学陈朝吉/四川大学张伟 ACS Nano:仿生梯度水凝胶电解质界面优化构筑稳定锌离子电池 2025-07-21
- 武大常春雨、宁波材料所陈涛/魏俊杰《Adv. Mater.》:面向超灵敏自供电离子皮肤的电场诱导双梯度水凝胶离子二极管 2025-04-03
