北卡州立大学尹杰、黄鹤团队 Nat. Commun.:更柔、更强、更精准多功能软机器手
2023-08-04 来源:高分子科技
传统的软机械抓手对于抓取易碎、超薄、和超重的物体非常有挑战性,因为需要在柔顺性、强度和精度之间进行权衡与取舍。最近,北卡州立大学的尹杰团队和黄鹤团队设计了一种基于剪纸的新型软抓手可以使得鱼与熊掌兼得。他们最新研究了一种通过利用设计角度的具有藤状抓取轨迹的超轻柔、超强和超精准抓手(图1a)。该抓手是基于之前的剪纸软抓手的设计并进行了大幅度的改良。因此新的抓手既能够在最小接触压力(0.05千帕)下精细地抓取易碎液体(图1b),也可以抓取载重达到其自身重量(0.4克)的16000倍的物体(6.4公斤,图1c),同时也能在平面上精确地抓取厚度仅为4微米的薄片和直径为2微米的微纤维(头发丝的厚度一般为80微米),集超轻柔、超强与超精准于一身,并且都具有极高的成功率。
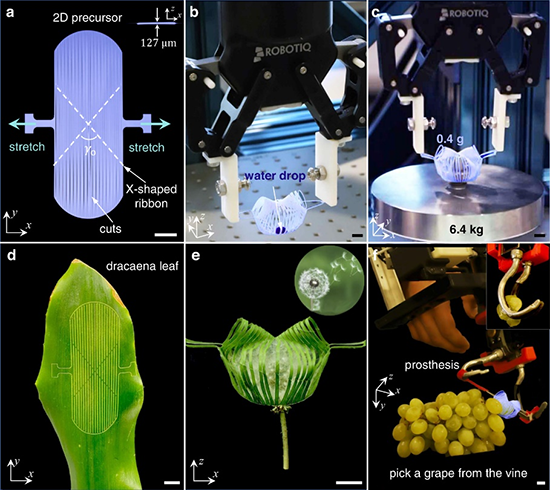 图1:多功能剪纸抓手可以轻易抓起各种易碎物品如液滴以及超过自重16000倍的砝码。也可以拓展到植物叶子无损抓手以及与假肢集成摘葡萄等。
图1:多功能剪纸抓手可以轻易抓起各种易碎物品如液滴以及超过自重16000倍的砝码。也可以拓展到植物叶子无损抓手以及与假肢集成摘葡萄等。
 图2:各种具有挑战性的抓取物体总结,如细纤维、薄片、活鱼、布丁、生蛋黄、番茄酱、泡沫、水滴等等。
图2:各种具有挑战性的抓取物体总结,如细纤维、薄片、活鱼、布丁、生蛋黄、番茄酱、泡沫、水滴等等。

由于该设计与材料和尺寸无关,所以甚至可以使用天然叶子制作成为可生物降解的无损伤抓手(图1d),比如抓取易碎的蒲公英以及草莓(图1e-图2d)等。同时这种抓手也非常便于与机器人手臂和假肢进行集成,无需额外的电源、驱动器以及传感器等, 可以很好的辅助完成各种极具挑战性的任务,比如采摘葡萄(图1f)、拉拉链、叠衣服和翻书(图3)等。这项工作展示了在各种极端情况下表现出色的软抓手,比如抓取果冻布丁、鱼子酱、药片、废弃医疗针头、SD卡、以及水母等(图2)。具有广泛的潜在应用前景,比如农业采摘、食品加工、假肢、生物医学、微创手术和深海探索等。
图3 多功能剪纸抓手与机械臂以及假肢的简单集成用于处理各种挑战性的抓取任务
原文链接:https://www.nature.com/articles/s41467-023-39741-6
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 北卡州立尹杰团队 Nat. Mater.:十二般变化的灯笼剪纸 2025-10-10
- 多伦多大学刘新宇教授、北航罗斯达教授 Mater. Horiz.: 用于热理疗的激光诱导石墨烯剪纸结构可拉伸加热器 2024-02-24
- 湖南大学段辉高团队 AFM:剪纸结构水凝胶应变传感器赋能人机交互应用和摩斯密码识别 2023-09-19
- 《Nat. Comput. Sci.》封面:“拿捏得稳稳的” 2022-10-26
- 天津大学龚俊波/余亚东团队 AM:无机离子聚合锚定聚合物网络构筑超强超韧低共熔凝胶 2026-07-11
- 大连理工蹇锡高团队李海龙/张守海、大连工大邹方鑫 AFM:超强聚醚砜气凝胶 - 通过定向冷冻-刻蚀-常压干燥策略实现优异热声绝缘性能 2026-07-09
- 南开刘遵峰/中国药大周湘/天工大王润 AFM:“颈缩”不再只是失稳 - 受蜘蛛丝启发的超强韧水凝胶纤维 2026-06-11
