同时提高纤维材料的强度和韧性是工业和科学研究的一个重要而长期的目标。高强度使纤维能够承受重物,高韧性使纤维能够吸收高冲击能量。人们开发了不同的策略来提升纤维的部分性能,如创建交联网络、自组装形成纳米纤维、引入牺牲结构、采用捻曲结构获得螺旋排列、应力诱导聚合物断链和形成、拉伸-释放训练以增加聚合物链和纳米纤维的排列、以及整合上述机制的分层设计。这些提升纤维强度的方式,通常是采用提高分子链的轴向取向增加纤维内部的结晶程度。但是,分子链的轴向取向总是会导致纤维强度的增加和韧性的降低。要同时提高分子链的取向性和纤维的伸长率,从而获得高强度和高韧性仍然是一个挑战。
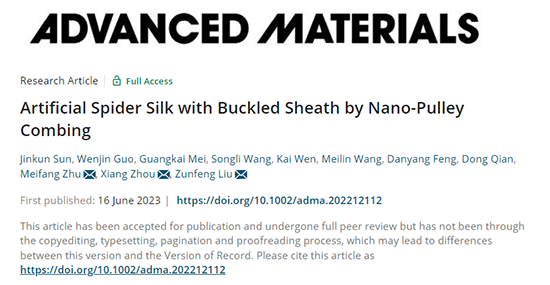

图1带褶皱鞘层的PRx-HF的制备、形态和机械性能。

图2 PRx-HF的力学性能、广角图和偏振显微镜图像显示PR对聚合物链排列的梳理作用。
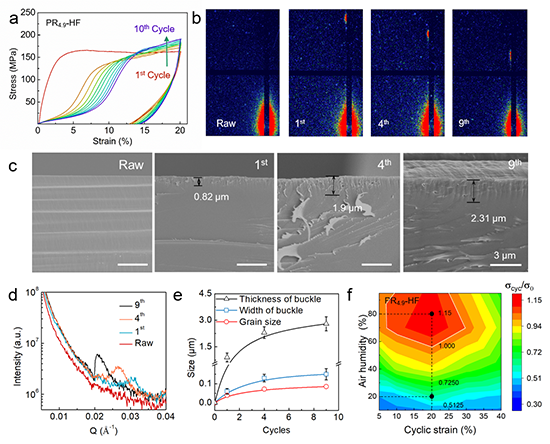
图3 循环拉伸-释放训练中PR4.9-HF力学性能和衍射模式的演变。
图4 PRx-HF湿汽驱动性能分析。
综上所述,通过模拟皮肤,通过对PR水凝胶纤维的循环训练,研制出了一种带扣鞘的人造蜘蛛丝。PR中的a-环糊精充当梳子,在纤维拉伸过程中增加聚合物链的排列,然后在随后的纤维松弛过程中折叠成屈曲的结构。PR作为一系列的动滑轮来承受更高的应力,作为动态交联来增加聚合物链的延伸,提高纤维的耐水性。人工蛛丝的断裂强度为1.61 GPa,韧性为466 MJ m?3,超过了最强的天然蛛丝。此外,PR人工蛛丝表现出强大的超收缩驱动能力,做功量为1.89 kJ g?1,驱动行程为82%,驱动应力为22 MPa,是一种强大的纤维人工肌肉。通过分子排列设计具有屈曲结构的人造蜘蛛丝,可能会启发防护设备、可植入生物材料、假体、人工肌腱、人工肌肉和智能设备的新设计。高排列聚合物链的折叠和屈曲结合光纤驱动可应用于其他领域,如光学、电气和磁性设备,以及与高鲁棒性光纤、传感器、能量采集器和人机界面相关的领域。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adma.202212112
'' fill=''%23FFFFFF''%3E%3Crect x=''249'' y=''126'' width=''1'' height=''1''%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
刘遵峰教授课题组招聘信息
招生及招聘内容:
推免生、硕士、博士、博士后、特聘副研究员等
学科方向:
材料学,化学,生物学、纺织与纤维、金属、计算模拟、电子信息等学科
实验室研究方向:
1.高强韧纤维、智能材料
2.人工肌肉、传感器
3.纳米材料、柔性固态制冷等
课题组网址:https://liuzunfeng.nankai.edu.cn
招聘要求:
1.博士招收采取推免制,具有独立的科研能力,英语水平良好(6级或其它相当水平),具有发表英文学术论文经验;性格开朗,有良好的团队合作和对外沟通能力;
2. 能够协助合作导师管理和完成科研项目并协助指导研究生。
3. 要求应聘人员工作认真负责,踏实肯干,具团队精神。
应聘方式:
(一)请应聘者将简历及相关证明材料( 文章、成果情况等 )通过邮件,以“应聘岗位+姓名”为主题发送至以下邮箱:liuzunfeng@nankai.edu.cn
(二)将以邮件或电话的方式通知通过初选的应聘者,前来参加本单位组织的笔试或面试。
刘遵峰教授简介
刘遵峰,南开大学教授,国家杰出青年基金获得者。
研究方向为柔性智能高分子纤维材料,包括高强韧人造蜘蛛丝、人工肌肉、柔性电子、柔性制冷等。在 Science , Nat. Commun., Adv. Mater.等国际学术 SCI 期刊上发表研究论文 100 余篇。其中2015年关于可拉伸导体的研究工作被美国《Discover Magazine》评选为2015年度全球TOP100重大科学发现;2019年关于“扭热制冷”的工作发展了逆转制冷新方法,大幅提高了制冷效率;研发的水凝胶纤维人造蜘蛛丝强度与韧性性能接近天然蜘蛛丝;基于多种纤维材料等发展了多种智能织物。发展了基于零泊松比褶皱结构的弹性导体,构建了多层次协同作用的模拟神经传导、应变传感、驱动为一体的人工肌肉纤维。 多篇关于柔性健康监测的文章被选为封面文章,受邀撰写多篇综述,授权中国专利8余项,在多个国内外学术会议做邀请报告40余次。
五篇代表性论文:
1. Run Wang#, Shaoli Fang#, Zunfeng Liu*, Ray H. Baughman* et al. Torsional refrigeration by twisted, coiled, and supercoiled fibers, Science 2019, 366(6462): 216-221.
2. Zunfeng Liu, Shaoli Fang*, Ray H. Baughman* et al. Hierarchically Buckled Fibers for Superelastic Electronics, Sensors, and Muscles, Science 2015, 349(6246): 400-404.
3. Xueqi Leng, Guangkai Mei, Guanghao Zhang, Zunfeng Liu* and Xiang Zhou*. Tethering of twisted-fiber artificial muscles, Chem. Soc. Rev. 2023, 52: 2377-2390.
4. Yuanyuan Dou, Zhen-Pei Wang, Wenqian He, Tianjiao Jia, Zhuangjian Liu, Pingchuan Sun, Kai Wen, Enlai Gao, Xiang Zhou, Xiaoyu Hu, Jingjing Li, Shaoli Fang, Dong Qian, Zunfeng Liu*, Artificial Spider Silk from Ion-Doped and Twisted Core-Sheath Hydrogel Fibres, Nat. Commun. 2019, 10, 5293.
5. Kaiqing Yu, Xiaozhou Ji, Tianyu Yuan, Yao Cheng, Jingjing Li, Xiaoyu Hu, Zunfeng Liu*, Xiang Zhou*, Lei Fang* Robust Jumping Actuator with a Shrimp-Shell Architecture, Adv. Mater. 2021, 2104558.
- 南开刘遵峰教授课题组招收2026年入学推免硕士、直博生等 - 材料学、化学、高分子、生物学、纺织与纤维、计算模拟、电子信息... 2025-06-13
- 南开大学刘遵峰教授课题组招收博士生(2025年入学)、师资博士后等 - 材料学、化学、高分子、物理、生物学、纺织与纤维、金属、计算模拟、电子信息等 2025-04-17
- 南开大学刘遵峰教授/东华大学朱美芳院士/中国药大周湘副教授《Adv. Mater.》:受神经元启发的粘附性人造蛛丝 2023-06-21
- 武汉大学常春雨教授课题组 AFM:高强度、各向异性矿化甲壳素可吸收螺钉 2026-06-04
- 四川大学王玉忠团队 AFM:兼具高强度、韧性与回弹性的热塑性弹性体 2026-06-03
- 吉林大学孙俊奇教授、李懿轩副教授团队 AFM: 基于二茂铁构象转变构筑低滞后、高强度与高韧性无液体离子导体 2026-06-02
- 中国林科院林化所张猛/悉尼大学程文龙/南昆大宋平安 Adv. Mater.:含磷/氮及π-共轭联苯结构单元实现弹性体高强、高韧、阻燃及自修复 2026-06-01
