中国地质大学(武汉)夏帆、陈林峰团队《Adv. Mater.》:肠胃蠕动启发的双层管状水凝胶驱动器用于黏性液体的定向输送
2023-04-28 来源:高分子科技
液体可控传输是涉及微流体,水收集,打印,分析检测等领域的一个基础科学问题。长期以来,研究者们通过在表面设计浸润性梯度或/和结构梯度,实现对不同液体的可控定向传输。该方法适用于水和常见有机试剂等低黏度的液体,对于日常生活和化学工业中常见的高黏性液体(>100 mPa s),如重油、聚合物溶液、乳化液、蜂蜜和许多离子液体等,其可控定向传输一直是一个巨大的挑战,主要原因是黏性液体与基底之间存在高粘附作用力和粘滞阻力。通过界面润滑作用可有效降低阻力,但是其驱动力及方向不能有效控制。
哺乳动物(如人类)的肠胃具有蠕动功能,在传输黏性食物流体方面具有特殊的优势。肠胃蠕动通过驱动力控制(外层平滑肌定向收缩)和阻力控制(内表面分泌润滑黏液)的协同作用,可以持续定向地有效传输黏性食物流体(即食糜液,其粘度可达到2000mPas)。
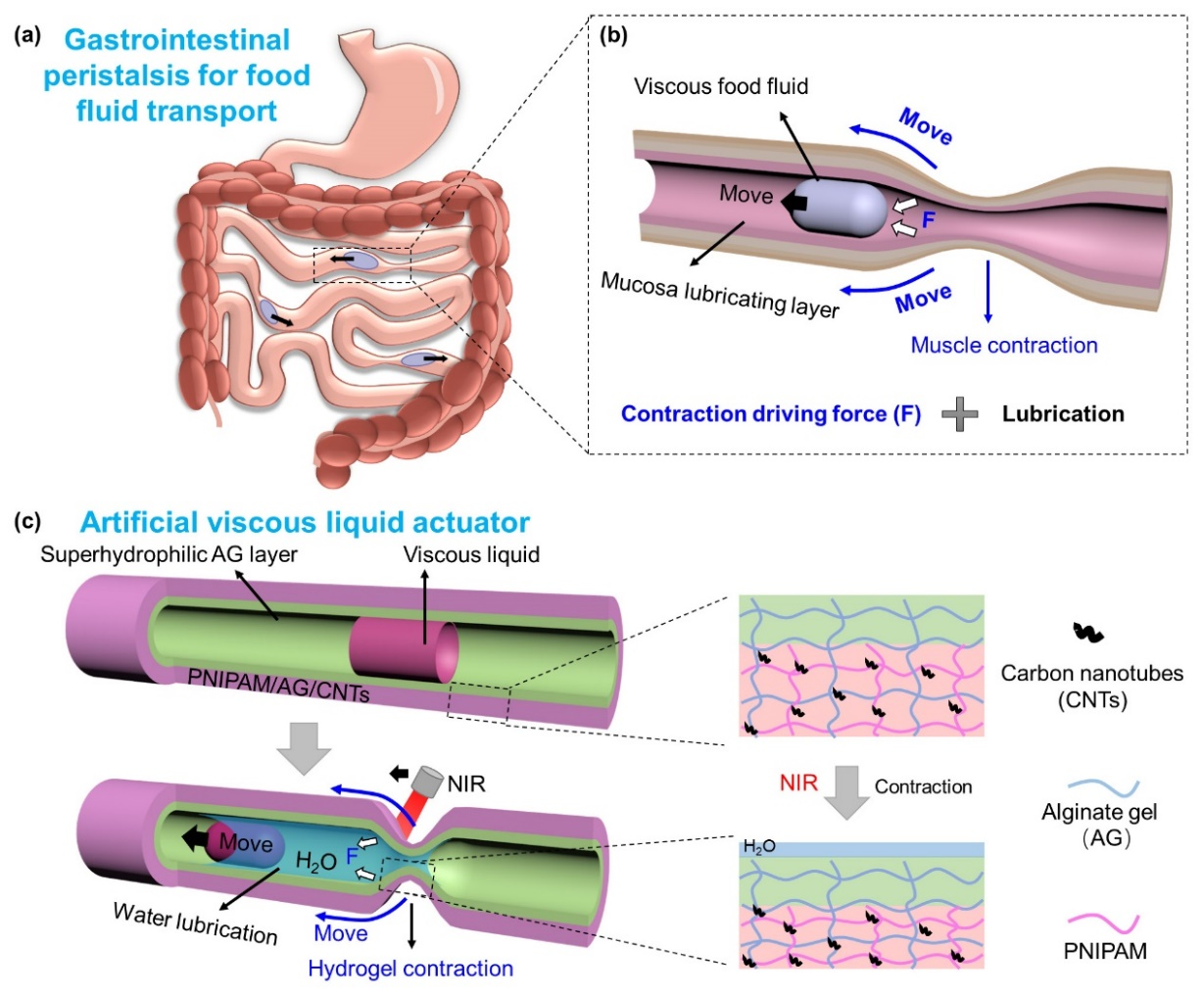
图1:DLTHA的设计示意图

图2:DLTHA的形貌表征
该研究为高黏性液体的定向输送提供了一种通用的新策略,不仅扩大了液体操纵/输送的研究范围,为新型液体传输驱动器的设计提供新思路,而且在基于高黏性液体的微流体,软体机器人,打印喷头,人工血管等领域具有潜在的应用。该工作以题为“Gastrointestinal peristalsis-inspired hydrogel actuators for NIR-controlled transport of viscous liquids”的文章发表于Advanced Materials上。文章第一作者是中国地质大学(武汉)硕士研究生张立云。该研究得到国家自然科学基金委的支持。

图3:DLTHA的粘性液体输送性能

图4:DLTHA的潜在应用展示
原文链接:https://doi.org/10.1002/adma.202212149
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
