中科院深圳先进院杜学敏研究员团队 NSR:光控“液滴机器人”
2022-08-25 来源:高分子科技
液滴操控对于基础研究和诸如生化反应、诊断分析等实际应用都尤为重要。尽管采用电场、磁场等外场操控液滴备受瞩目且取得较大进展,但这类液滴操控通常需借助大型设备、复杂的电极设计,或需添加电/磁响应性材料,极大影响液滴操控的灵活性与持久性。光作为非常典型的外场之一,虽可通过光化学、光机械、光诱导马兰戈尼效应,或光诱导电场等策略,将光转变为液滴运动的驱动力进而克服上述问题,但仍面临新的挑战:一方面,由于光产生的驱动力很大一部分被界面阻力抵消,导致液滴运动速度慢、距离短且灵活性差;另一方面,采用紫外光、光响应性试剂或因光导致的损伤等问题,使其在无污染、生物相容性好、可靠性需求高的生化领域应用面临挑战。

近日,中国科学院深圳先进技术研究院杜学敏研究员团队,构建了一种基于智能高分子材料的新型超双疏表面(photo-induced charged superamphiphobic surface, PICS)。该PICS结合了光与电的双重优势,通过光热诱导表面电荷实时、高效、持续再生能力,实现光控液滴高速、长距离、多模态、群体精准运动,并进一步拓展到具有环境感知功能的液滴机器人及细胞输运等生物应用。

光控液滴高速长距离运动
液滴机器人在管内搬运物体
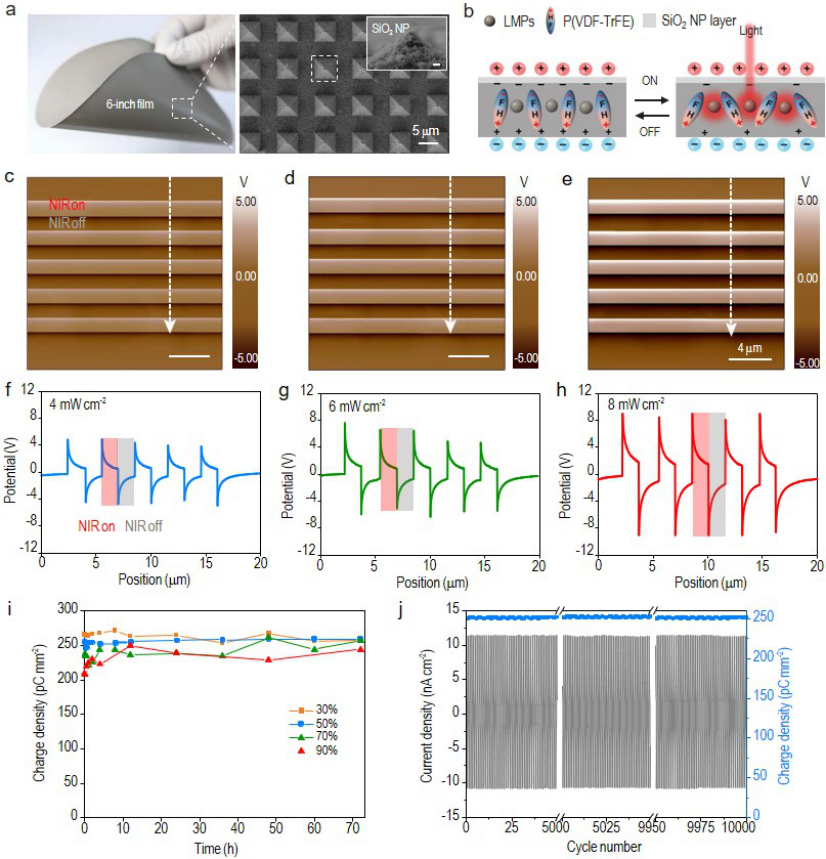
图1:大面积制备具有优异力学特性的PICS及其光诱导电荷实时再生性能。

图2:PICS上光控液滴多模态、高效、稳定循环运动。

图3:PICS上采用手持激光笔操控液滴机器人。
原文链接: https://doi.org/10.1093/nsr/nwac164
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 南开刘遵峰教授课题组招收2026年入学推免硕士、直博生等 - 材料学、化学、高分子、生物学、纺织与纤维、计算模拟、电子信息... 2025-06-13
- 南开大学刘遵峰教授课题组招收博士生(2025年入学)、师资博士后等 - 材料学、化学、高分子、物理、生物学、纺织与纤维、金属、计算模拟、电子信息等 2025-04-17
- 中科院深圳先进院杜学敏团队 Matter:活性界面材料精准调控外泌体分泌促血管神经协同修复 2024-11-22
- 香港大学王立秋教授团队:热水超疏表面新突破 2019-08-02
- 中科院纳米能源所李琳琳&王中林团队《Chem. Eng. J.》:具有有机-无机同轴结构的柔性压电纳米纤维用于自供能生理传感 2022-09-16
- 中科院深圳先进院杜学敏/港城大王钻开《Sci. Adv.》:光诱导带电润滑表面 2022-07-09
- 复旦大学陈茂课题组 Nat. Commun.:光控交替共聚制备高结晶度ECTFE及其热塑性材料 2025-12-17
