磁驱动微型软体机器人能够通过无线磁场以远程控制的方式实现复杂的操作,在生物医学领域具有广泛的应用前景。然而,基于固体材料(例如,硅胶,水凝胶等)的磁驱动微型软体机器人有着较好的刚度和稳定的形状,但由于其变形能力受到预先设计的形状限制而无法在极端狭窄的环境中灵活运动;相比之下,基于液体材料(例如,磁流体,液态金属等)的磁驱动软体微型机器人能够以实现大尺度的变形,但却受到形状不稳定的限制。因此,开发一种能够实现快速固-液切换并具有多功能的磁机器人仍然是一个挑战。
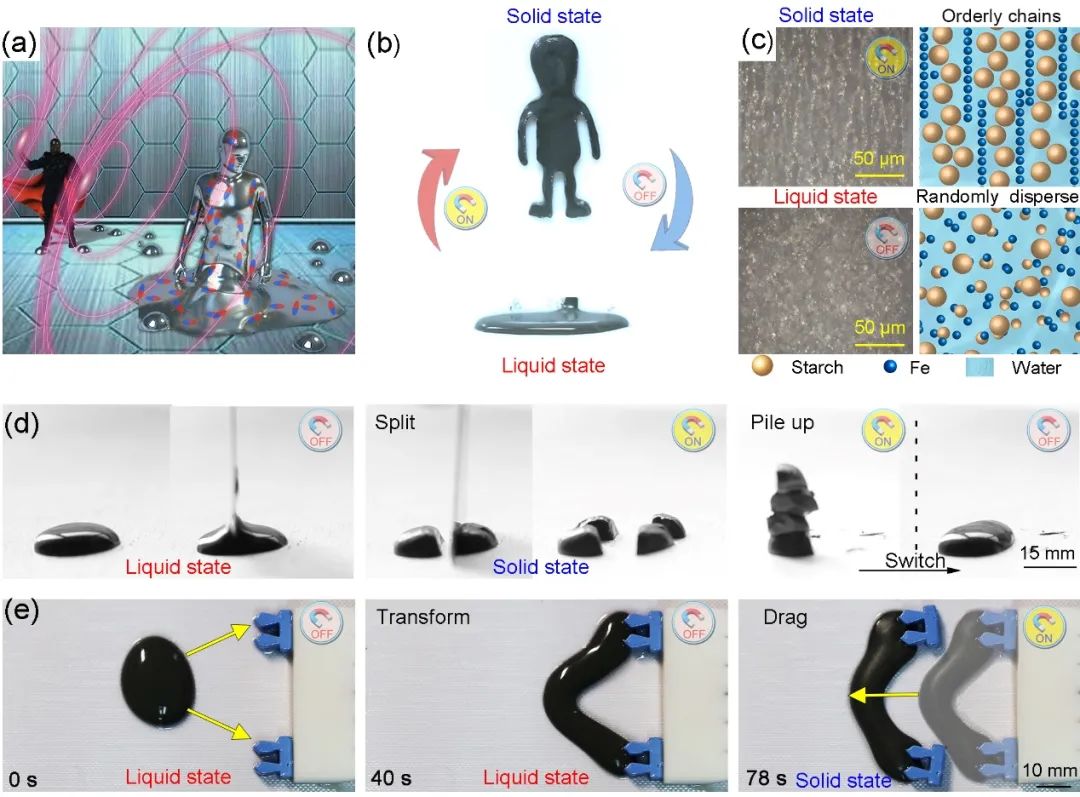
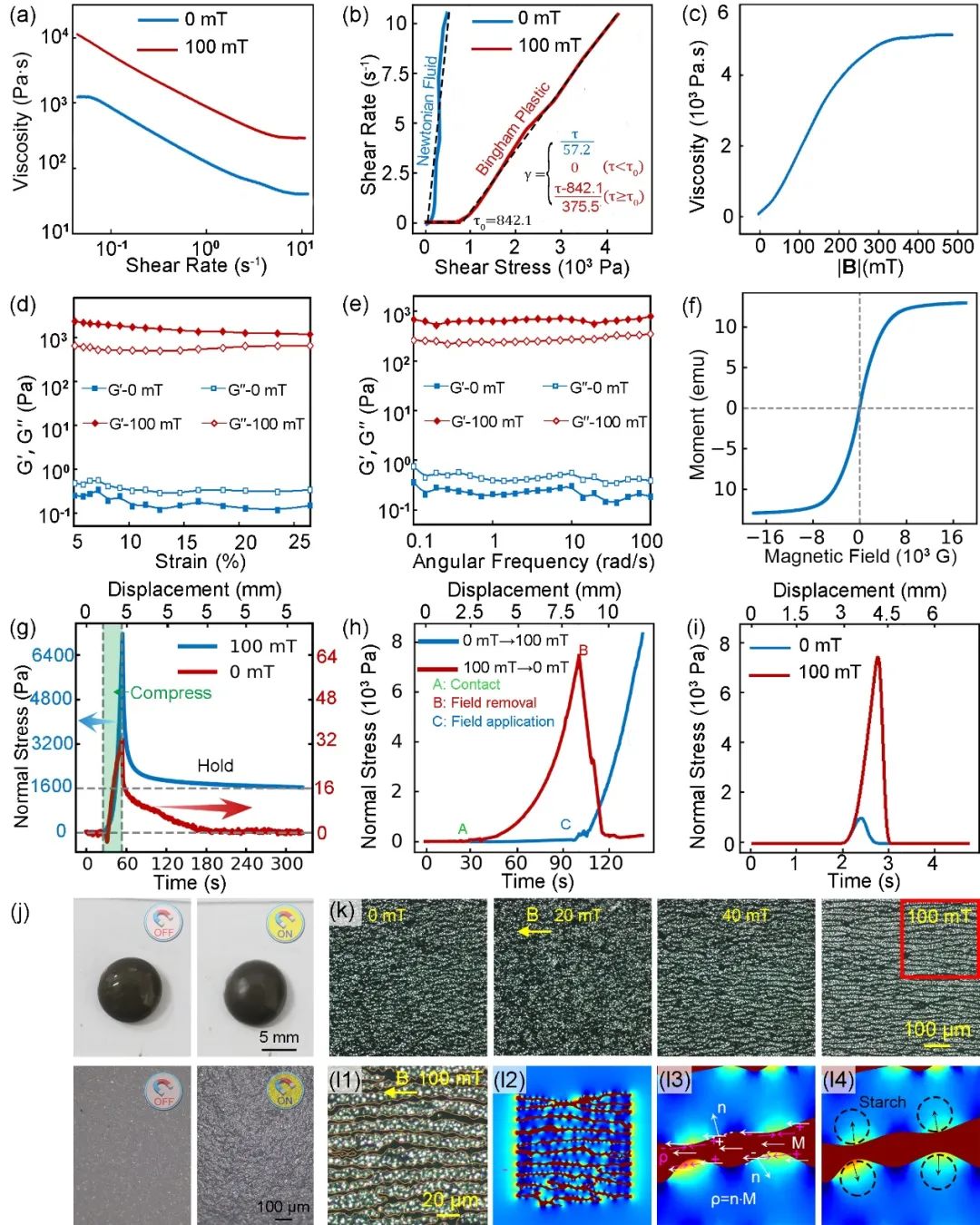
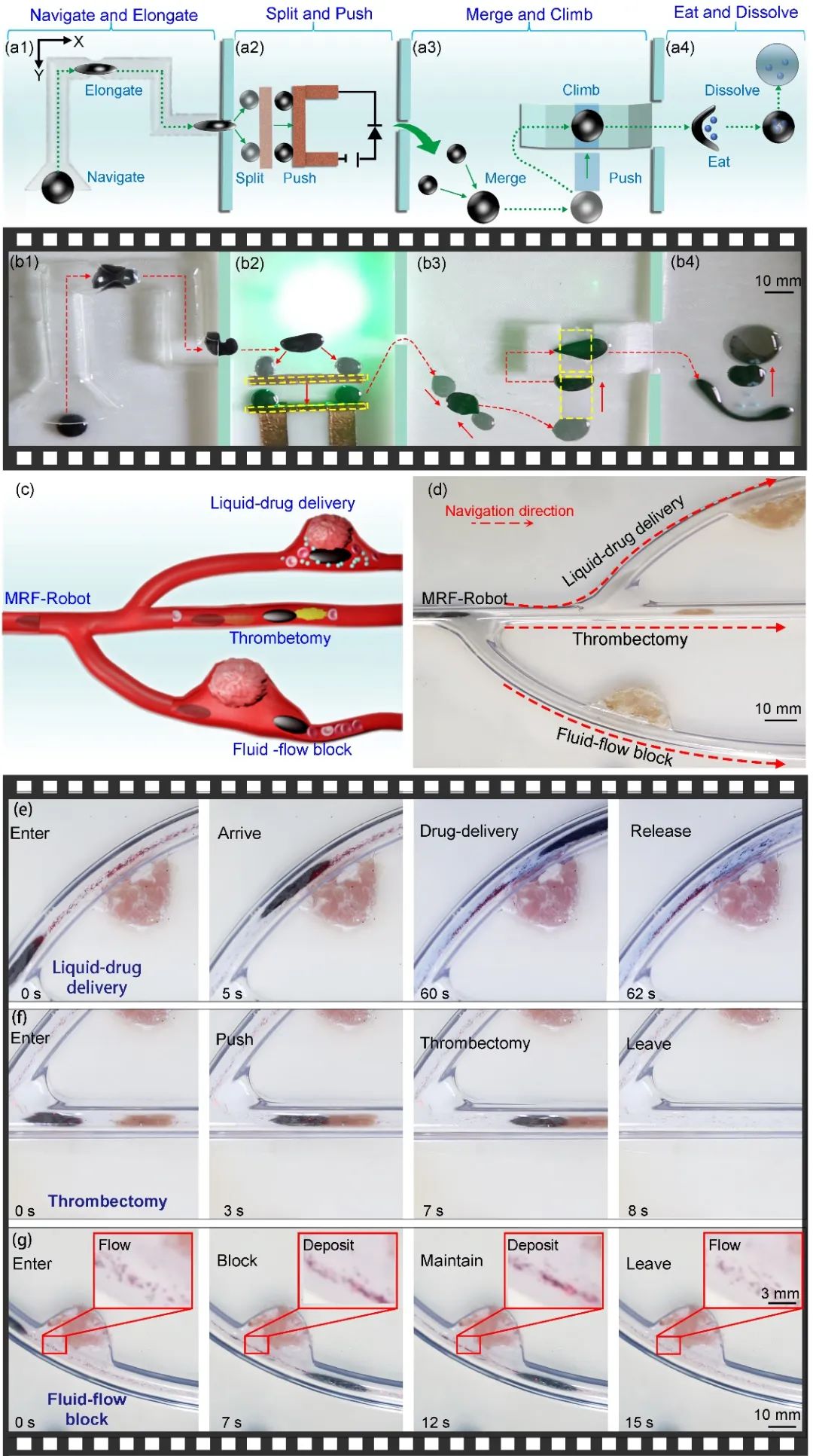
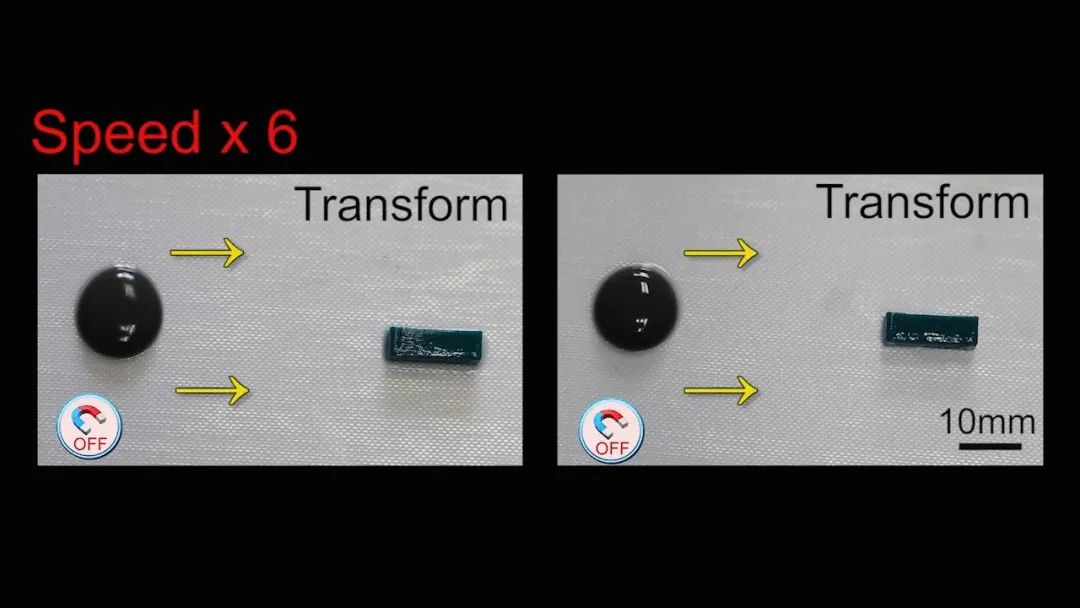
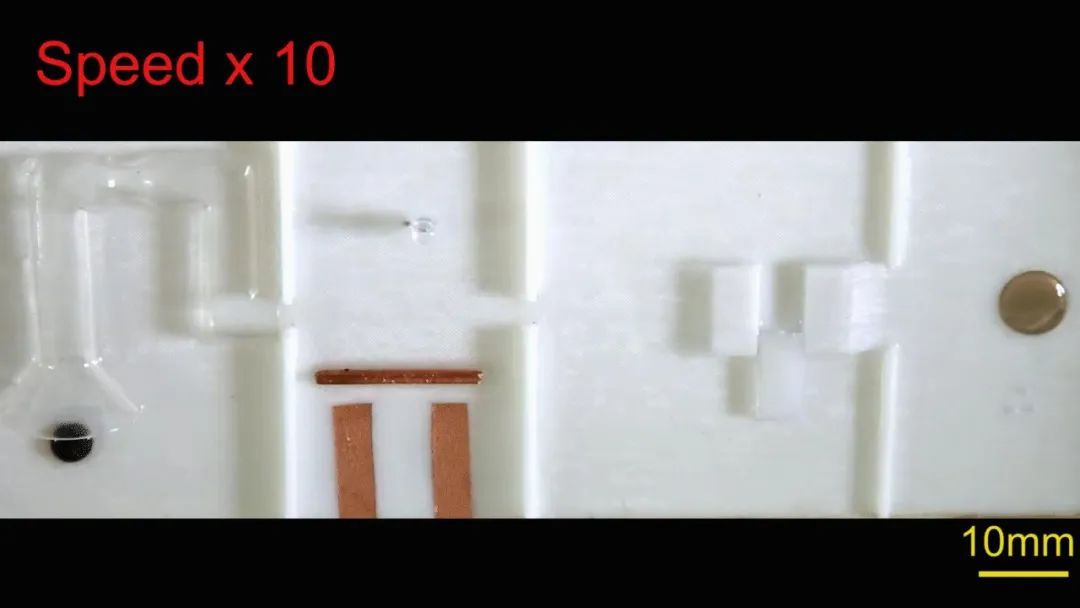
近期,受好莱坞大片《终结者2》中T-1000机器人和《X-战警》中万磁王的启发,中山大学蒋乐伦教授团队报道了一种基于磁流变液的固-液可切换磁驱动微型软体机器人(磁流变液机器人)(图1a)。文中研究分析了磁流变液机器人受磁场控制的固-液切换性能、力学性能以及微观结构(图2),发现磁流变液机器人可以实现在弱磁场(≈0 mT)下的牛顿流体(液态)和强磁场(≈100 mT)下的宾汉姆塑性体(固态)之间自由、快速地转换(图1b),并且展示了其基于固-液切换能力下的自愈、形状稳定、智能粘附物体等行为。液态磁流变液机器人可以在高梯度弱磁场的驱动下实现大变形、平稳导航、原地分裂、融合和跳跃等多种行为;固态磁流变液机器人可以在高梯度强磁场的驱动下,具有形状可重构的可控运动和多用途的物体操作(包括物体的拉、推和旋转)(图1e)。此外,通过在固态和液态之间自由地切换,磁驱动下的磁流变液机器人可以在综合场景中连续机动地完成管道导航、修复电路、爬坡以及收集微球等多种任务,并实现血管模型中的液体给药、血栓清除和流体流动阻塞等功能行为。(图3)。这项研究工作为磁驱动机器人的设计制造以及应用开发开拓了新的研究思路,所提出的磁流变液机器人通过完全磁控的固-液切换,实现了固体磁驱动机器人和液体磁驱动机器人的优势互补,扩展了其在生物医学上的应用前景。该工作以“Solid-Liquid State Transformable Magnetorheological Milli-Robot”为题发表在《ACS Applied Materials & Interfaces》。中山大学生物医学工程学院博士后陈志鹏和硕士研究生卢威斌为论文的共同第一作者,中山大学生物医学工程学院蒋乐伦教授为论文的通讯作者。

原文链接 https://pubs.acs.org/doi/10.1021/acsami.2c05251
- 斯坦福大学赵芮可团队 Adv. Mater. 综述: 电磁驱动功能材料 2026-01-17
- 西安交大唐敬达课题组《ACS AMI》: 三相态磁驱动微型机器人 2024-01-25
- 中国科大龚兴龙团队:反映各向同性软磁流变弹性体动态磁驱动行为的力磁耦合模型 2023-12-27
- 宾大杨澍团队、UCLA金丽华团队 Science:把“打结”变成动力 - 会跳、会翻、还能“飞回来的”软体微型驱动器 2026-04-24
- 浙江大学邱建荣教授团队 Nat. Electron.: 热塑性聚合物色散微涡旋实现片上微型光谱仪 2026-04-22
- 华南理工大学黄飞团队 Nat. Commun.:基于p-n导电聚合物的多功能集成电致变色器件 - 从自供电智能窗到微型光谱仪 2025-12-25
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
