自然界中生物可以控制片状器官产生多样的三维波浪形貌,并利用波动来实现丰富的功能,例如海蛞蝓利用片状足底产生的肌肉波浪来实现在海底爬行,哺乳动物利用消化道的蠕动来传输食物。相比之下,人造柔性机器人系统产生的波动远不及自然系统生物体波动形貌和功能的多样性。如果能够设计和创造出一种新颖的柔性形变机器人系统,不仅能够自适应地在单片人造肌肉(MSAM)上编程实现多种三维波浪形貌,还能够同时实现三维波浪的自持续运动。这种自持续的波动柔性机器人系统将具备推进、运动、传输功能,为自动机器人、自持续柔性机器、生物医学设备等领域的创新发展提供无限可能。
近期,西湖大学工学院吕久安团队开发出了一种可以在单片柔性人造肌肉(MSAM)中实现三种自发行进波的软体机器人系统。该系统可以产生三种不同的光致三维波动行为,分别为扭曲引发的扭转波形运动、边缘波动、中心波动(图1)。系统的核心设计理念结合了两个不同的生物智能实例所采用的原理,即植物叶片不同三维波浪的形貌产生原理,以及鳐目鱼胸鳍的波动运动原理。前者提供了一种三维波浪形状选择机制,能够通过差异性生长使 MSAM 自发形变成不同的三维波浪形貌,而后者提供了一种驱动原理,通过节律性运动模式使得所构建的三维波能够产生自持续传播。该系统由两部分组成,如图2a所示。其一是驱动单元,由平直的、受限的 MSAM 组成,MSAM可以局部生长、变形、自适应成型为目标三维波型;其二是一个可程序化重构的光学装置,这个光学装置可以提供结构光图案,所使用的光学装置是具有灰度图的商业投影仪或配备有光掩膜板的光源。通过切换结构化光,三种波型可以原位自由切换(图2h)。为了清晰理解三维波浪产生和传播的机制,团队结合植物波浪形态发生和鳐鱼波动运动机制对系统设计进行了阐述,强调了静态光输入诱导材料固有的光机械耦合相互作用的对波浪形貌和自动波动的重要性(图3)。该系统采用的光致三维波浪形态产生机制和自发波动机制可广泛地适用于刺激响应材料的三维形态产生和功能开发,能够为可编程的柔软的机器人、柔性发动机/马达/泵、自动能量铺获和转换、微机械系统等前沿高新技术领域提供新设计和新思路。该工作以“Photomorphogenesis of Diverse Autonomous Traveling Waves in a Monolithic Soft Artificial Muscle”为题发表在《ACS Applied Materials & Interfaces》上, 西湖大学博士研究生赵桐辉为第一作者,吕久安研究员为通讯作者,该研究工作得到国家自然科学基金的资助支持。
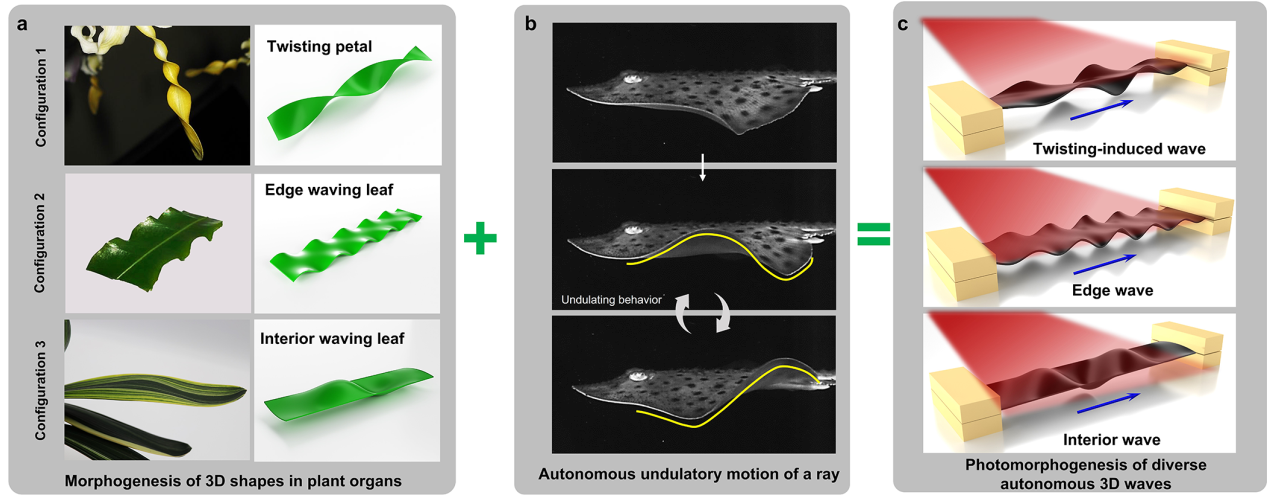
图 1 仿生原理。(a)植物叶片的三种不同 的三维波浪形状:扭曲形状、边缘波形状、中心凹凸起伏形状。(b)鳐鱼的波动运动。(c) 结合上述植物叶叶片形貌产生和鳐鱼波动的两个原理,设计了一种利用结构化静态光在单片柔性人造肌肉中产生三种三维波形并同时实现自发波动运动的柔性机器人系统。
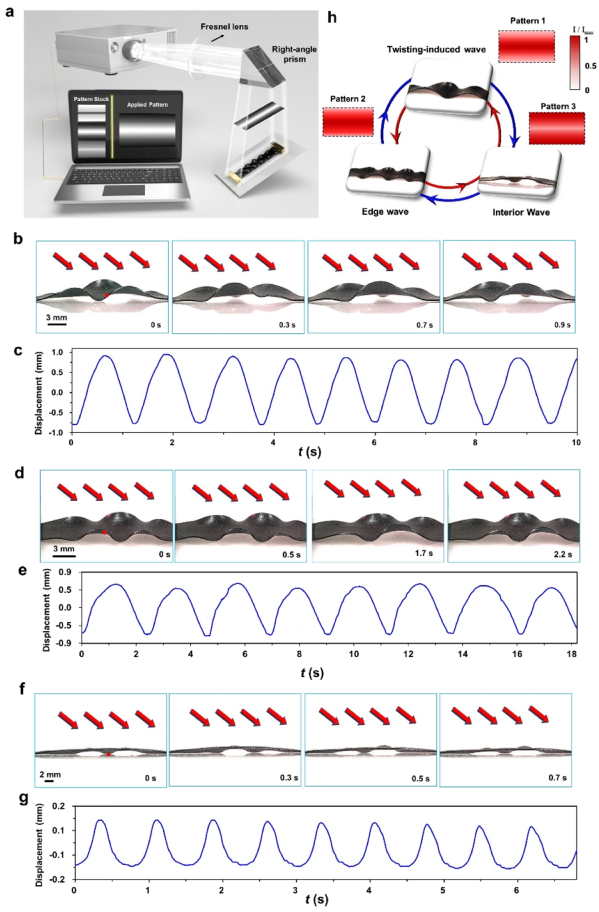
图2 三维波浪运动。(a)自发波动运动的柔性机器人系统装置由两个单元组成:1. 受限的 MSAM 所构成的变形单元;2.可图案化、可编程的光源作为控制单元。 (b, d, f) 实验得到的三种不同类型的三维波:扭转波、边缘波和中心波。(c, e, g)三种不同三维波随时间变化的位移轨迹曲线。(h)通过调制光斑的结构化图案,可以在三种不同的三维波之间展开原位可逆自由转换。
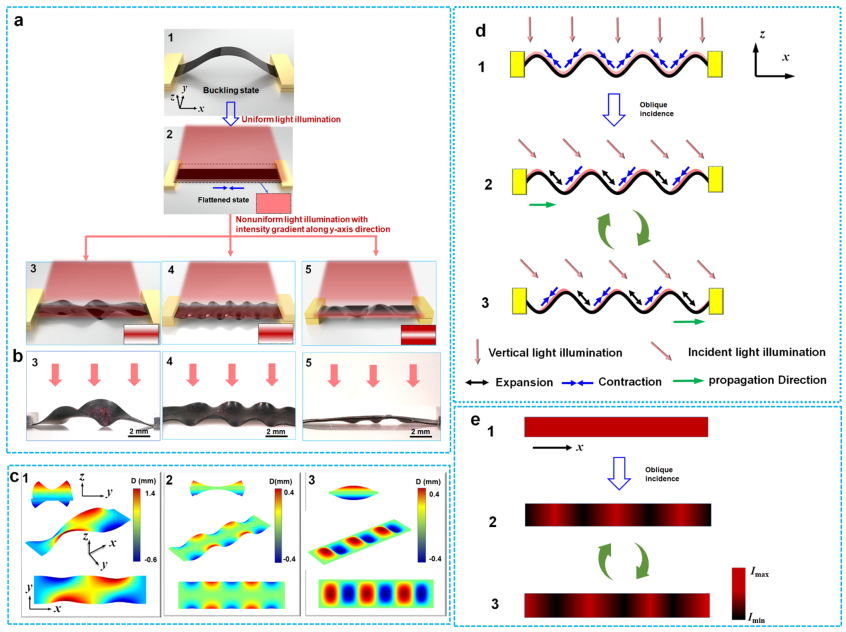
图3 光驱动自发波动运动的柔性机器人系统设计策略。(a)受植物叶片三维波浪形态产生启发的形变原理。(a1)显示系统中单片软人工肌肉(MSAM)原始屈曲状态的示意图。屈曲的 MSAM 两端被固定。(a2)显示 MSAM 在垂直光照射下的平坦状态示意图。(a3, a4, a5)当光斑的强度被图案化分布,从均匀转变到不均匀时,产生三种不同的三维波状形态(扭转波、边缘波和中心波)。(b3, b4, b5)由非均匀结构光斑辐射下,MSAM产生的扭转波、边缘波、中心波。(c)三种三维波型的有限元模拟。(d)MSAM 光机械耦合产生自动波动示意图。(e) x 轴方向诱发的节律性、周期性、图案化光强分布。

图4 三维波动应用展示。(a)波动的MSAM兼具电动机和输送带的功能,克服重力来运输货物。(b)S形轨迹运动的蠕动波。(c)MSAM上同一位置产生的中心波分裂成夹角为~30°的两个蠕动波。(d)菱形轨迹运动的蠕动波。(e)三角形轨迹运动的蠕动波。(f)利用蠕动波推动两个物体产生完全不同的运动轨迹。(g)两个蠕动波推动两个物体在MSAM表面相向运动。
原文链接:https://pubs.acs.org/doi/10.1021/acsami.2c02000
- 长春应化所张强研究员课题组与合作者 Adv. Mater.:基于支链淀粉水凝胶神经探针的脑机接口技术 2024-12-17
- 广州大学刘鹏和NCL谢丰蔚 ACS Sustain. Chem. Eng.:淀粉水凝胶构建全淀粉基柔性电池和自供电柔性传感材料 2022-05-17
- 川大雷景新教授团队江亮/雷元 AFM:通过多级强弱动态结构设计低应变下的高应变响应和可回收传感器 2024-12-27
- 广西大学徐传辉教授 AFM:基于生物梯度结构实现应变和湿度高响应的柔性橡胶基传感器 2024-04-10
- 海南大学卢凌彬教授团队《Chem. Mater.》:双机制驱动下的环境友好型应变响应高分子凝胶 2023-03-16
- 西安交大延卫教授课题组、丁书江教授课题组等在柔性电池研究领域取得重要进展 2019-10-30
- 中科院深圳先进院唐永炳研究员团队研发出基于改性凝胶聚合物电解质的高效柔性双离子电池 2018-07-30
