长期的水下任务会导致严重的减压病 (DCI)。2011 年美国劳工统计局记录,潜水员的平均职业死亡率是全国平均职业死亡率的 38 倍。水下捕捞是潜水员的典型任务之一。使用水下机器人加抓取手代替潜水员可以有效减少对潜水员的健康伤害,提高水下作业的效率。然而,开发具有自适应抓取和感应能力的机器人抓取手始终具有挑战性。
近日,北京大学谢广明教授课题组在国际期刊Advanced Science上发表了题为“Glowing Sucker Octopus (Stauroteuthis syrtensis)-Inspired Soft Robotic Gripper for Underwater Self-Adaptive Grasping and Sensing”的研究论文,介绍了一种灵感来自于发光章鱼 (Stauroteuthis syrtensis) 的软体抓取手,可以实现水下的自适应抓取和感应。
大多数章鱼只有柔性手臂,表面分布有粘性吸盘。不同的是发光章鱼的背膜覆盖了它的大部分臂长,形成独特的伞形,这样的特点可以通过防止动物从手臂间隙逃逸并增加抓取摩擦力来有效提高大物体和活体动物的抓取可靠性。在这项研究中,受发光章鱼捕食行为的启发,并借助 3D 打印和模块化浇注技术开发了一种新型软体抓取手,其几何结构和抓取能力与发光章鱼相似。
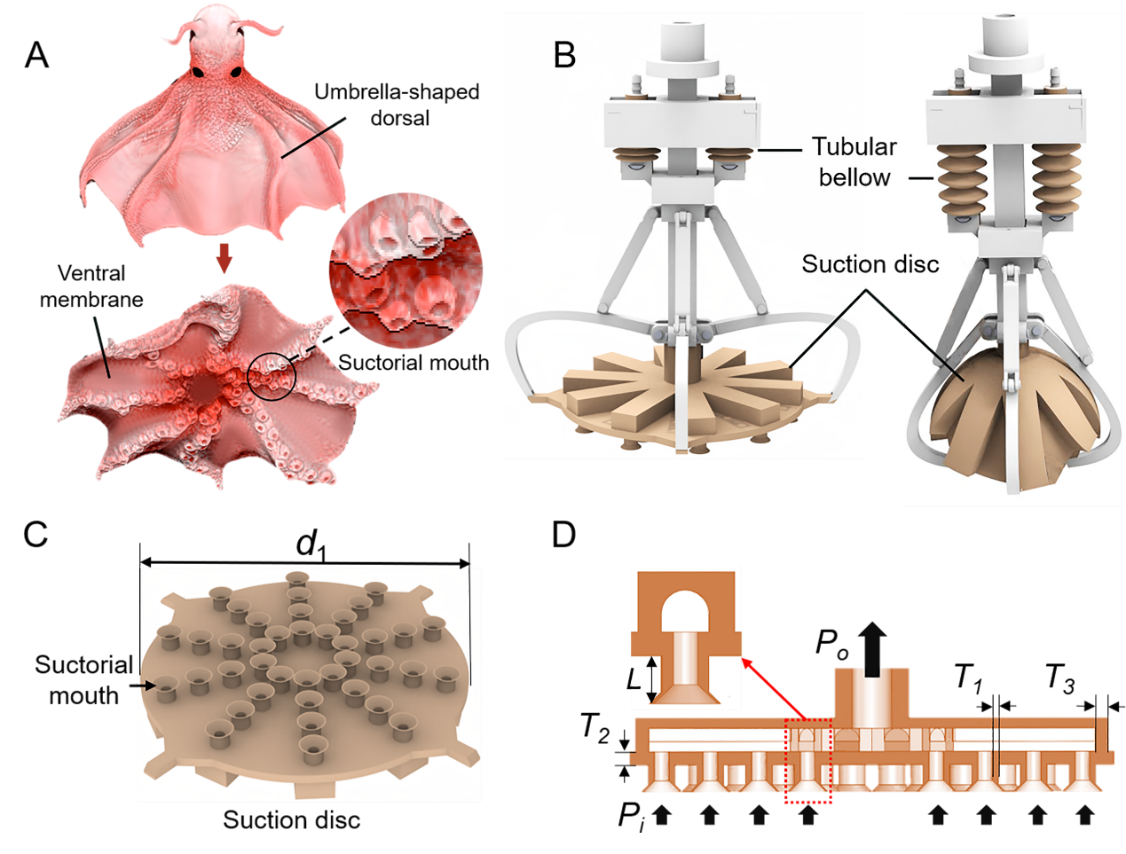
图1. (A) 发光吸盘章鱼的形态结构。吸嘴阵列分布在软臂上,背膜连接软臂形成伞状。(B) 仿生抓取手CAD模型。吸盘可以在管状波纹管的驱动下打开和关闭。(C) 吸盘CAD模型。具有漏斗形末端的吸嘴阵列分布在吸盘上。(D)吸盘内部通道示意图。

图2. 吸盘的制造及有限元仿真分析。(A) 模块化模具的CAD模型。(B) 模具组装示意图。(C) 吸盘仿生原型照片。(D) 吸盘的柔性。(E) 吸盘闭合的有限元分析模拟。
该抓取手可以利用吸嘴被覆盖时发生的流量变化而产生触觉感知能力,分辨出各种物体的尺寸。因此,在浑浊的水下环境中,当机器视觉失效时,该抓取手的触觉可以发挥重要作用。

图3。水下浑浊环境下吸盘的传感功能。(A)吸盘的工作环境。(B)当吸盘接触不同直径的圆盘时,流量发生变化。(C)实物传感测试。根据流量来区分对象的类型。
该抓取手具有出色的吸力和抓取能力,可以产生单独吸力抓取,单独吸盘闭合抓取及吸力和吸盘闭合共同作用抓取的三种抓取模式。实验展示了该抓取手可以抓取多种形状(平面或非平面)和尺寸的物体、散落的多个物体、活体(乌龟和金鱼)、超重物体和超出抓取范围的物体等。

图4. 抓取手在空气中对不同形状物体进行抓取。(A) 软体抓取手的装配。吸盘的开启与闭合通过管状波纹管的伸缩来控制,实现对物体的抓取。(B )吸力模式下抓取物体。 (C) 抓取不规则小物体。该抓取手可以同时抓取多个物体。(D) 抓取大型不规则物体。该抓取手可以从边缘抓住较大的物体。
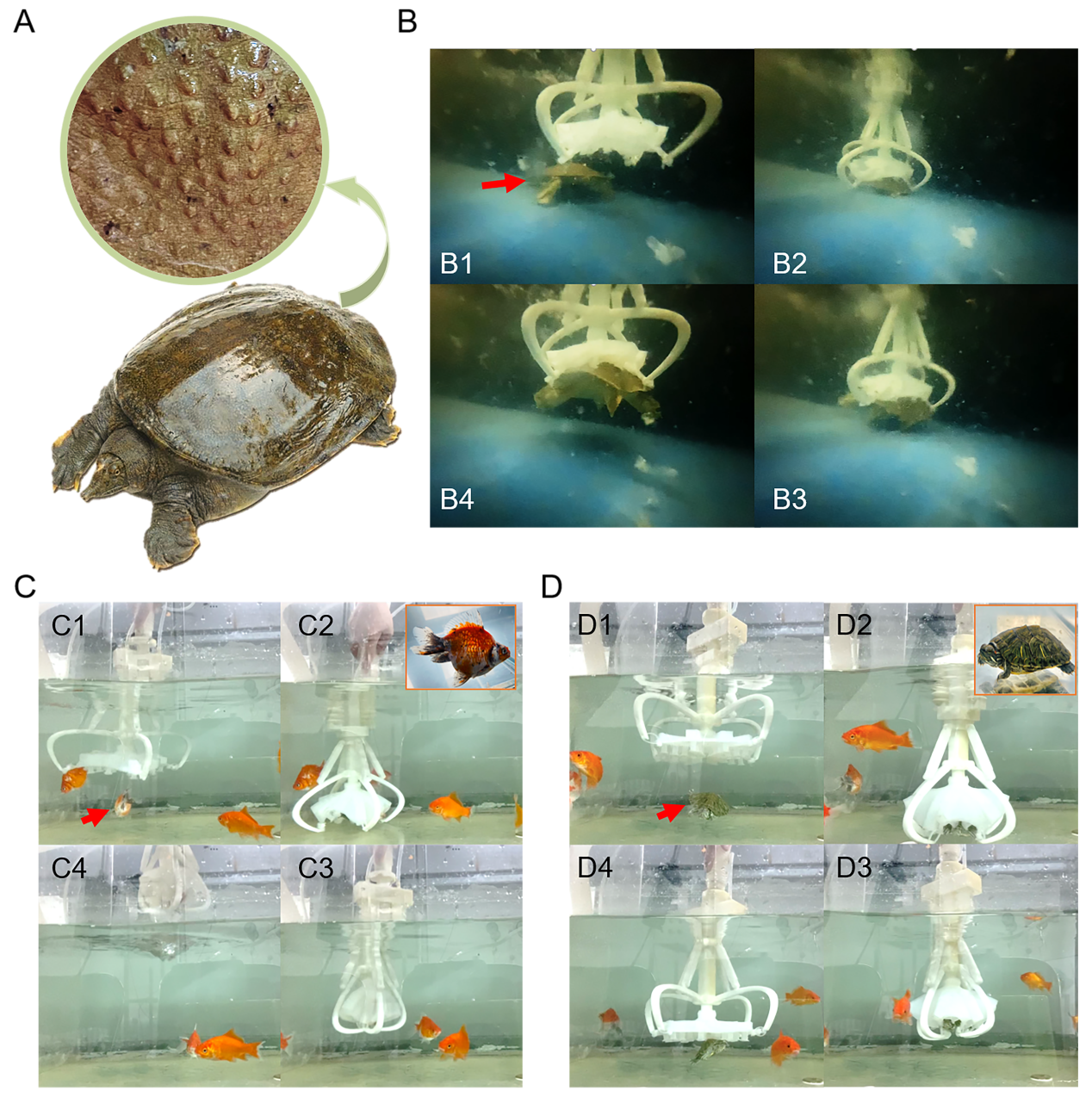
图5. 软体抓取手动物抓取实验。(A-B) 吸力抓取背部有很高的粗糙度的一只活海龟。(C) 伞状吸盘和吸嘴可以控制小鱼被捉后不逃跑。(D)使用吸力来控制然后抓取海龟。
此外,由于吸盘由柔软的硅胶材料制成,因此可以实现对水下动物的无损抓取。所抓取的动物都可以通过打开抓取手吸盘回到水中自由游泳。
该仿生软体抓取手由吸盘产生吸力与闭合进行抓取形成的独特的混合抓取模式,使得其无论是在空气中还是水下都展示出了出色的抓取能力。未来,该抓取手在水下打捞、物流分类、流水线上异类物体的选择和放置等方面将具有广阔的应用潜力。
论文的第一作者是谢广明教授课题组的博士生武明信,通讯作者是谢广明教授和郑兴文博士,合作单位包括中山大学、英国帝国理工学院、荷兰格罗宁根大学等。该研究得到了国家自然科学基金委和南方海洋科学与工程广东省实验室(广州)的经费资助。
原文链接:https://doi.org/10.1002/advs.202104382
- 浙江大学柏浩教授团队《Adv. Mater.》:白鲢鱼鳔“以柔克刚”的各向同性抗疲劳机制 2026-07-24
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 东南大学李霁教授团队 AFM:受竹子启发,超强、可回收、3D 打印的超分子共晶凝胶 - 用于冲击防护与刺激响应驱动 2026-05-07
- 华东理工刘润辉教授团队与合作者 AFM:3D 打印双仿生支架用于大段骨修复 2024-12-28
- 圣地亚哥州立大学杨阳教授、武汉大学王自昱教授 NC:3D 打印仿生结构中生长可回收和可修复的压电复合材料-用于保护性可穿戴传感器 2023-10-19
- 大连海事大学徐敏义教授、邹永久副教授团队 Small:一种用于机械状态监测的柔性自驱动导电海绵-硅胶基摩擦电式振动传感器 2024-03-25
