能够对湿度、光、热和电等外界环境刺激做出反应的智能材料,已经吸引了大量的研究关注,特别是能够可逆地改变其尺寸和形状的智能驱动器。其中,湿度驱动器是一种很有趣的智能驱动器,它可以将湿度激发的化学能转化为其他形式的能量,如机械能,其最终可呈现为智能驱动器的宏观机械形变。近年来科研人员对湿度驱动器进行了大量的研究,为其在环境监测、远程控制、人机交互等前沿领域的应用奠定了基础。驱动的本质和机制也为驱动器在即将到来的人工智能时代提供了潜力和巨大的发展空间。
鉴于此,北京化工大学潘凯教授课题组、浙江大学朱林利教授团队报道了一种新型的石墨烯基湿度驱动器,它具有精确可控的响应方向和响应位置。所制备的驱动器具有快速的湿度响应性能、变形程度大和优秀的力学稳定性。微观结构观察和理论分析表明,Janus结构和周期性微观结构诱导了这些新型的湿度驱动器湿度-力学响应的高灵敏度。且激光还原诱导的定向微观结构能够精确地控制石墨烯基Janus膜中湿度响应的方向和位置。他们设计了一系列复杂的智能设备,如滚筒状、带状和三维波形状的湿度驱动器,其湿度响应可以高度匹配并验证有限元模拟结果,这进一步启发了科研人员对智能机器人精确变形的设计。相关工作以“Graphene-Based Moisture Actuator with Oriented Microstructures Prepared by One-Step Laser Reduction for Accurately Controllable Responsive Direction and Position”为题发表在《ACS Applied Materials & Interfaces》。
石墨烯基Janus膜的制备
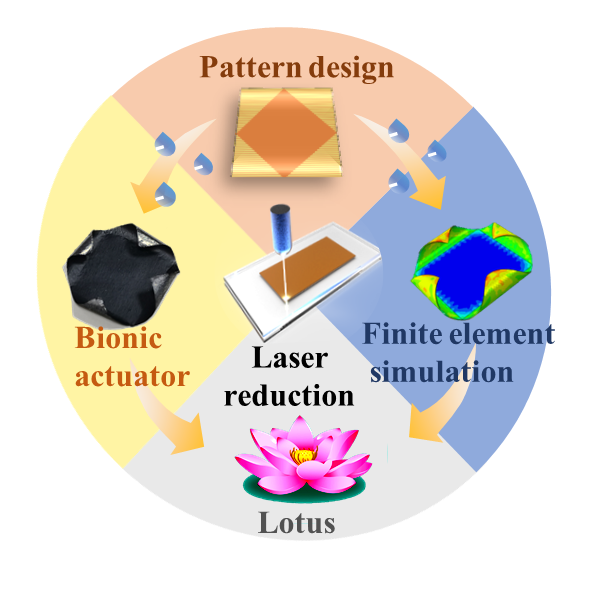
激光还原是一种简单、强大、可控的氧化石墨烯(GO)还原方法。作者采用激光还原法成功地制备了石墨烯基Janus膜。相比与未还原的氧化石墨烯层,激光使还原氧化石墨烯(rGO)层具有蓬松的多孔结构和线性取向的微结构(图1a)。考虑到激光的可编程性,通过计算机软件设计了一系列的扫描图案,有一个有趣的现象,即带图案的石墨烯基Janus膜在低湿度条件下呈莲花状形状(图1b)。激光的可控编辑为他们制备的石墨烯湿度驱动器在智能设备中的应用提供了可能。

图1(a)激光诱导石墨烯基Janus膜制备工艺示意图。(b)仿生图案设计。
湿度驱动性能
湿度驱动性能是湿度驱动器的关键,为了进一步研究石墨烯基Janus膜的湿度和温度响应,他们制备了三种不同激光扫描速度的石墨烯基Janus膜,并对其进行“湿度/温度驱动响应形变和响应速率”驱动性能测试(图S2)。在优化的基础上,他们进一步确定了石墨烯基Janus膜的弯曲角度与环境条件之间的定量关系。其响应性能如图2所示。结果表明石墨烯基Janus膜可在短时间内达到约1000°的弯曲形变,且石墨烯基Janus膜的弯曲能力具有极好的稳定性,经过“低湿度-高湿度”和“高温度-低温度”多次循环测试后仍保持稳定的响应角度;且同比于其他石墨烯基湿度驱动器,高湿度下石墨烯基Janus膜的驱动速率及形变角度更具优势。

图2(a)在RH=85%和RH = 10%时石墨烯基Janus膜的变形;(b)石墨烯基Janus膜在20℃和60℃下的变形;(c)石墨烯基Janus膜(rGO-1)的水分响应;(d)在RH=20%和RH=85%之间的可逆弯曲运动随时间变化的曲线;(e)湿度响应的循环实验;(f)石墨烯基Janus膜在不同激光速度下的热响应;(g)可逆弯曲运动在20℃至60℃之间的随时间变化曲线;(h)温度响应循环实验。
石墨烯基Janus膜的湿度响应的机理探究
一般来说,结构设计在智能驱动器中起着重要的作用,而湿度响应的关键是利用材料或结构的力学性能不匹配来完成相关的智能动作或指令。双层膜的Janus结构作为一种代表性类型,可以更有效、更直观地表达不同材料层中外部刺激所产生的机械能。为了更好的解释石墨烯基Janus膜的湿度驱动机理,本文基于力学原理建立了一个力学模型,采用有限元方法进行模拟分析,以深入了解驱动行为在几何结构、湿度及力学形变间的关系。作者提出,以单个周期结构为例,相对湿度的增加允许更多的水分子进入GO片层间的空隙空间,从而导致GO层沿着膜的横向方向膨胀,其中膨胀力与GO片层之间的距离成反比。因此,当湿度增加时,GO膜中致密段的膨胀力大于疏松部分的膨胀力,这种膨胀力的差异是驱动的动力源。当在激光处理下,GO还原为rGO时,可以产生定向取向周期性结构,如图3所示。为了进一步了解这种各向异性结构对石墨烯基Janus膜水分响应的影响,他们采用有限元方法模拟了具有周期性结构的各向异性膜的力学响应。作者提出了一个机理模型来揭示激光还原形成的各向异性和周期结构的变形机制(图4)。在周期结构中取出一个元素进行分析,沿激光方向的拉伸(rGO90°)可以简化为多个平行弹簧的拉伸,而垂直于激光方向的拉伸(rGO0°)可以简化为多个串联弹簧的拉伸。如图5所示,模拟分析得到的变形效果与实际湿度驱动响应的形变结果有很好的吻合性,充分说明上述提出的驱动机理及建立的力学模型的科学性。

图3 (c)中(a)rGO层和(b)GO层截面的放大SEM图像;(c)石墨烯基Janus膜的横截面SEM;(d) RGO层表面的SEM图像和插图显示表面接触角(59°);(e)GO层表面和表面接触角(94°)的SEM图像;(f1)石墨烯基Janus膜表面的SEM图像;(f2) (f1)的放大SEM图像;GO/RGO Janus执行器表面(g1)和截面(h1)的AFM图像;(g2) (g1) AFM放大图像;(h2) (h1)中的AFM放大图像。
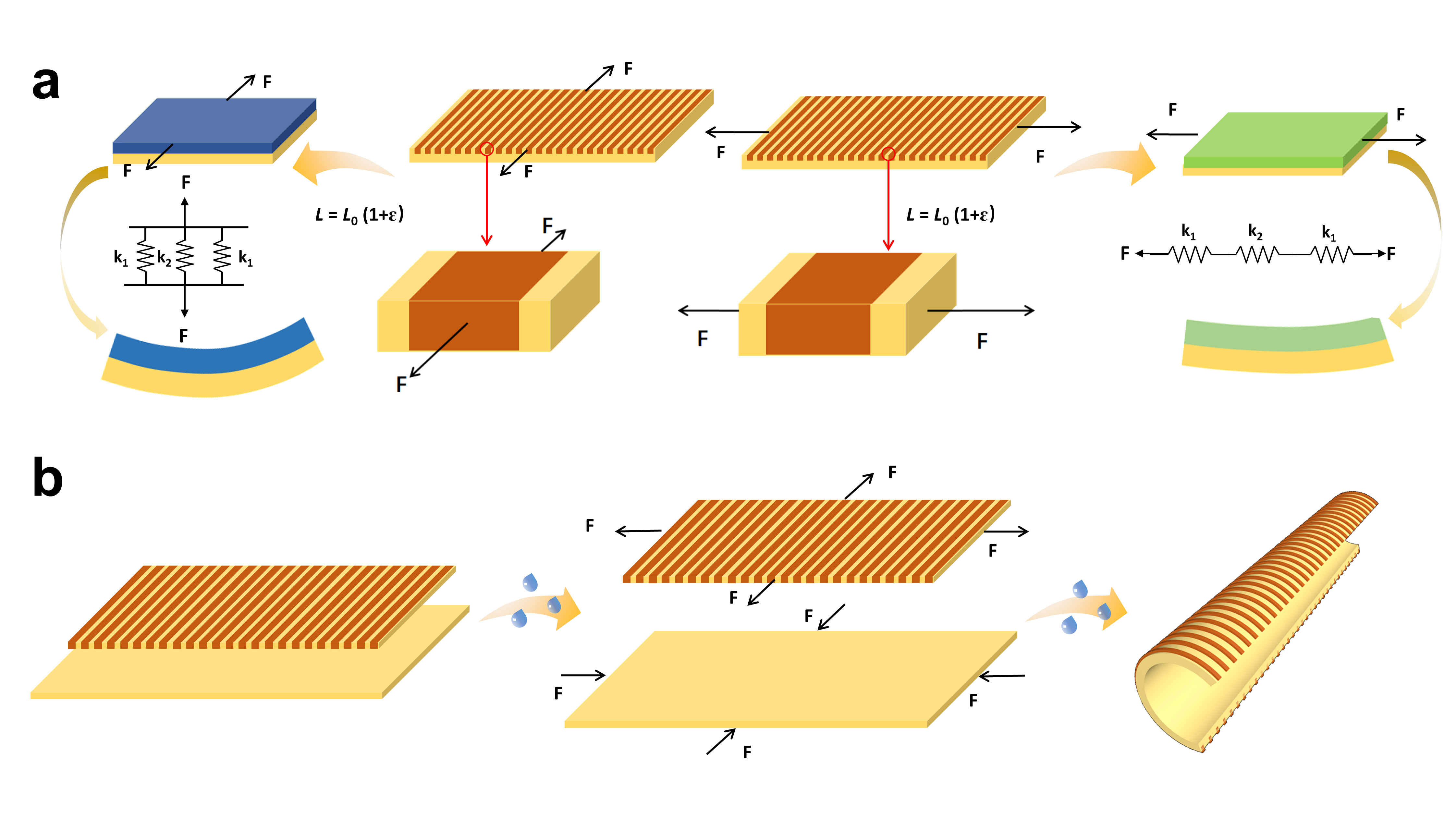
图4 (a)石墨烯基Janus膜rGO0°和rGO90°的力学等效分析模拟;(b)水分响应过程中rGO90°的力学模拟机理图。
驱动应用
利用上述的Janus结构和激光诱导的定向微观结构,所得到的石墨烯基Janus膜可以作为具有位置设置和方向可控响应的致动器。他们做了一些编程来设计还原氧化石墨烯膜,并从理论上分析了不同情况下的力学变形模式。

图5可控制位置和方向的石墨烯基Janus膜的设计、力学模拟和应用。
小结:作者利用一步激光还原法成功地制造了一种石墨烯基水分驱动器,它具有精确可控的响应方向和响应位置。受益于激光诱导的定向微结构和Janus结构,石墨烯基水分驱动器具有良好的湿度-力学响应行为。通过对激光诱导的线性排列微观结构的进一步观察和理论分析与建模,阐明了驱动行为中位置和方向可控响应的机理。此外,他们设计的一些复杂智能设备,如滚筒状、带状和三维波形状的湿度驱动器,可以与有限元模拟结构高度一致,有望在智能机器人、智能传感器、仿生设备和其他需要高力学精度的前沿领域得到广泛的应用。
全文链接:https://doi.org/10.1021/acsami.2c00873
- 武汉理工大学何大平、刘波/西湖大学黄嘉兴 Nat. Commun.:破解界面相互作用困境 - 实现日常织物保形石墨烯涂层宏量制备 2026-05-21
- 天津大学封伟团队 AFM:氧化石墨烯-熔盐复合材料突破高温光热相变储能瓶颈 2026-04-20
- 化学所刘国明、巴斯克大学Alejandro J. Muller、都灵理工大学Alberto Fina《Macromolecules》:石墨烯纳米纸中生物聚酯不同稳定性的晶体 2026-03-18
- 不列颠哥伦比亚大学姜锋教授、Peyman Servati教授《Nano Letters》:壳聚糖改性纤维素多孔结构用于可回收、高灵敏湿度驱动器及自动冷却纺织品 2024-11-01
- 南开大学张振杰课题组 Angew:仿生策略构建自振荡湿度驱动器 2022-11-29
- 浙江大学唐睿康、刘昭明团队AFM:基于有机无机共聚开发高灵敏度湿度驱动器 2021-04-26
- 西安交大徐光魁教授课题组 JMPS/Acta Biomater.:细胞塑性与各向异性标度律响应的变化与不变性 2024-04-24
