类肌肉结构的各向异性水凝胶可以有效提高水凝胶取向方向的抗疲劳行为(疲劳阈值>1000 J m-2),但垂直于取向方向上抗疲劳裂纹能力很差(疲劳阈值100 ~ 300 J m-2),使得这类材料无法满足一些特定场合的应用需求,比如软体机器人、柔性电子、电子皮肤和组织补片等。
近日,受启发于心脏瓣膜独特构效关系,南方科技大学刘吉团队在Advanced Materials上发表文章“Bioinspired 2D Isotropically Fatigue-Resistant Hydrogels”,报道了一种简单而通用的仿生策略来设计与制造具有二维面向各向同性的抗疲劳特水凝胶。他们通过双向冷冻铸造工艺形成整齐排列的层状微/纳米结构,随后进行压缩-退火处理,制备出的水凝胶材料在二维平面的任意方向上都展现出优异的抗疲劳特性,疲劳阈值均超过1500 J/m2。
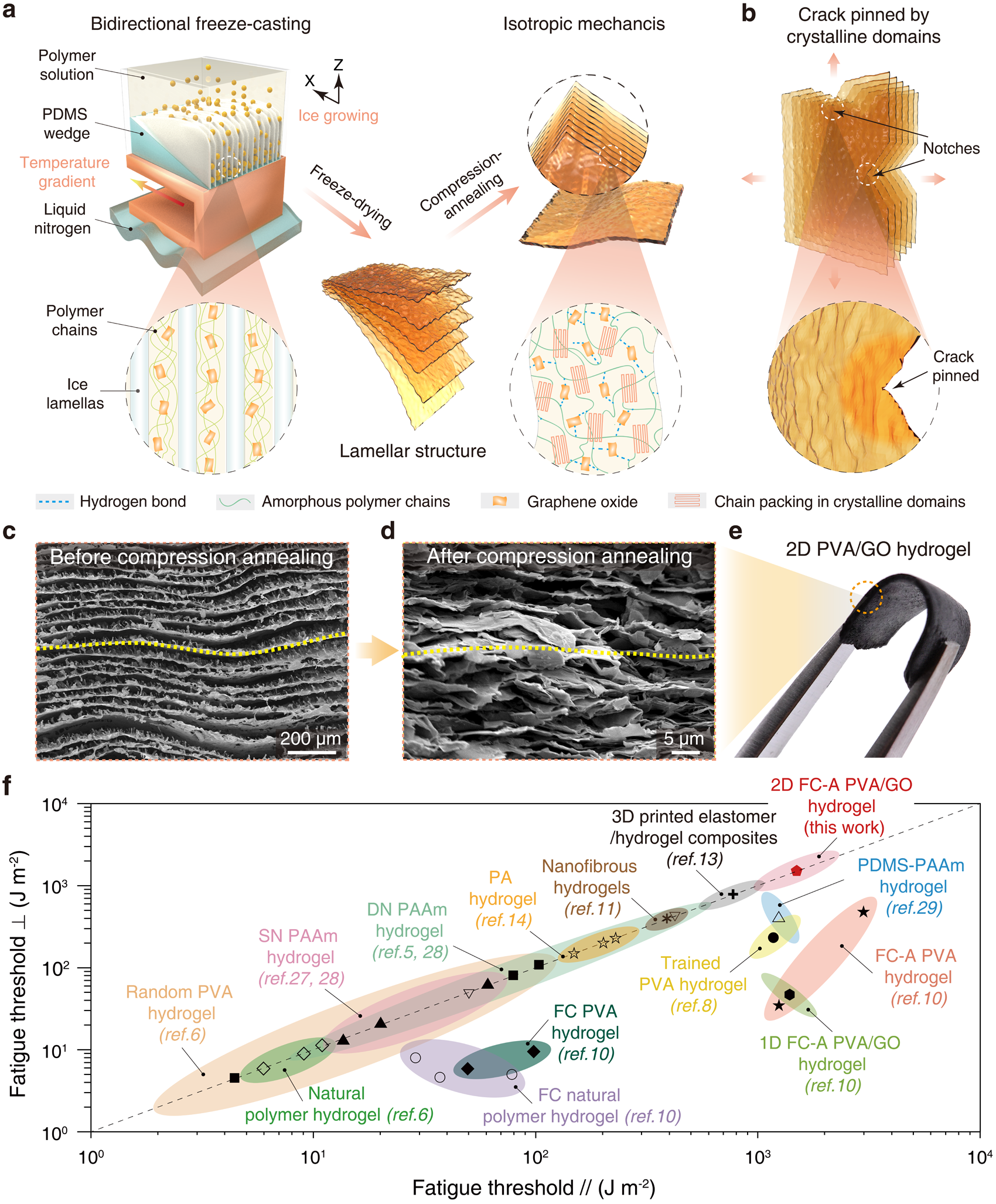
图1. 各向同性抗疲劳水凝胶的制备,多尺度结构和抗疲劳特性。
该工作所报道的二维各向同性抗疲劳水凝胶有望成为众多应用场景中二维面向承重部件的新型材料。作者设计并制造了一种效珍珠水母形态和运动方式的新型水下软体机器人,采用2D PVA/GO水凝胶作为机器人的头部承重部件(如图2所示)。这类各向同性抗疲劳水凝胶可作为力学传动部件,通过电驱动马达伸缩机器人的头部,实现该机器人可以在水下连续长期地向前游动(视频1)。在有裂纹存在的情况下,经过1,000,000多次的连续循环二维面内伸缩(水下游动长达450小时),裂纹明显明显拓展,表现出优异的二维抗疲劳特性(视频2)。
视频1. 机器人的设计模型和游动过程。

图2. 各向同性抗疲劳水凝胶应用于效仿水母的水下软体机器人,并经受百万次疲劳验证。
视频2. 机器人在水中百万次循环游动过程。
南方科技大学梁翔禹博士为该论文第一作者,刘吉副教授为通讯作者。该研究得到深圳市仿生机器人与智能系统重点实验室、广东省普通高校人体增强与康复机器人重点实验室、广东省自然科学基金-区域联合基金项目(青年基金)、广东省自然科学基金面上项目、深圳市自然科学基金面上项目等经费支持。
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/adma.202107106
招聘信息
刘吉课题组长期招聘研究助理教授、博士后和研究助理,有意者请将个人简历(pdf)等相关材料发送至liuj9@sustech.edu.cn邮件标题请注明“姓名+毕业学校+应聘职位”,期待您的加盟!
刘吉副教授及团队简介:刘吉博士于2019年9月加入南方科技大学独立建组,任博士生导师。主要研究领域为软材料的极限性能设计、仿生软材料、界面粘合、软材料3D打印以及功能软材料在组织工程上的应用等。近年来,在Science Advances,Nature Communications,PNAS,Advanced Materials,Advanced Functional Materials等期刊上发表文章40余篇。先后获得国家人才项目(2020)、《麻省理工科技评论》中国区 “35岁以下科技创新35人” (2020)、珠江人才引进高层次人才青年项目(2020)、深圳市海外高层次人才(2020)、日本高分子协会青年学者奖(2017)、玛丽居里学者(2015)等荣誉。课题组更多信息请看:http://faculty.sustech.edu.cn/liuj9/
- 浙江大学柏浩教授团队《Adv. Mater.》:白鲢鱼鳔“以柔克刚”的各向同性抗疲劳机制 2026-07-24
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 中国人民大学王亚培、贺泳霖/重庆大学卢阳/德累斯顿工业大学冯新亮 Sci. Adv.:具有超稳定自由基的二维共轭MOF实现高效NIR-II光热治疗 2026-05-10
- 中山大学元辛、顾林团队 PMS 综述:界面相约束效应 - 二维材料增强聚合物涂层的多尺度机制和工程突破 2026-05-08
- 中国科大程群峰、北航万思杰团队《Nat. Commun.》:室温连续化制备高性能碳化钛复合纤维 2026-01-13
- 江南大学刘天西、董建成/韩国科学技术院Steve Park连发两篇 Adv. Mater.:在电子皮肤领域取得系列研究成果 2026-06-26
