近年来,能够感知外界刺激并将外界能量(如电能、光能、热能以及化学能等)转换为弯曲、旋转、收缩等机械运动的智能材料受到广泛的研究关注。刺激响应智能材料能够广泛应用于人造肌肉、智能织物以及软体机器人等诸多研究领域。在自然界中,对湿度和水份响应的生物结构有着重要的生物学功能:如当环境湿度升高,松果将自动打开散播种子以及小麦将种子自动推进土壤等自然现象。受到自然界的启发,很多湿度和水份响应的弯曲型、旋转型以及伸缩型驱动器近年来得到迅速的发展。虽然石墨烯、碳纳米管以及合成聚合物等纤维材料已被报道用于制备纤维状人造肌肉,但这些材料高昂的造价和复杂的工艺限制了它们的应用。与此同时,很多天然产物,如壳聚糖、海藻酸盐、孢子和纤维素等制备得到的驱动器,需要经过生物质提取并处理定型等额外步骤,也增加了制备的复杂性。

针对以上问题,辽宁科技大学张志强教授团队和德州大学达拉斯分校Ray H. Baughman院士课题组受到“藕断丝连”的启发,从自然界中储量丰富的荷花杆中直接拉丝得到荷花纤维,并对荷花纤维进行简单加捻的方式,制得高性能湿度和水份响应的旋转型以及伸缩型人造肌肉,并将其应用于人造手臂和智能织物。相关成果以封面论文“Humidity- and Water-Responsive Torsional and Contractile Lotus Fiber Yarn Artificial Muscles”发表在ACS Applied Materials & Interfaces, DOI: 10.1021/acsami.0c20456。论文的第一作者为辽宁科技大学化工学院王月副教授。通讯作者为德州大学达拉斯分校的Ray H. Baughman院士和王重博士。
荷花纤维由于其独特的芳香性,柔软性和透气性,在古代就曾被广泛应用于织物。荷花纤维以螺旋盘绕的形式储存在荷花杆中。从荷花杆切口拉出的荷花纤维呈现出直径约为20微米的条带状,而每根条带是由直径约为2微米的单根纤维通过果胶等表面物质结合而成 (图1A, 1B)。荷花纤维结构中含有丰富的纤维素,能够很好的和水分子形成氢键,从而导致径向的吸水膨胀。通过简单加捻得到的扭曲结构 (图1C, 1E) 以及螺旋结构 (图 1D,1F) 能够放大径向的吸水膨胀作用,从而得到高效的旋转运动和伸缩运动人造肌肉。
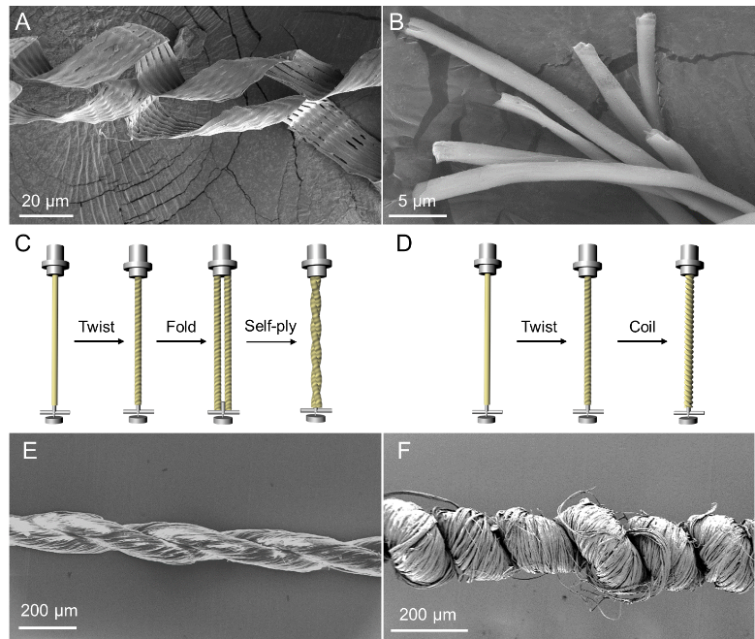
图1. 荷花纤维以及加捻后扭曲结构和螺旋结构的形貌
通过对加捻密度的优化,旋转型人造肌肉的最大旋转冲程达到了200o/mm,并且最快转速达到了200 rpm (图2A,2B)。此外,在500次的循环吸水-脱水过程中,正向和逆向的旋转运动基本保持一致, RSD%(n=500)分别为2.99%(正向)和2.35%(逆向),说明人造肌肉具有很好的循环稳定性 (图2C,2D)。考虑到在旋转运动中的最大加速度为21 rad/s2,同时所施加的桨叶具有I = 1.2 × 10?8 kg·m2 的转动惯量(桨叶重量为肌肉自身重量的1937倍),旋转型人造肌肉产生的相对力矩为488 mN·m/kg。
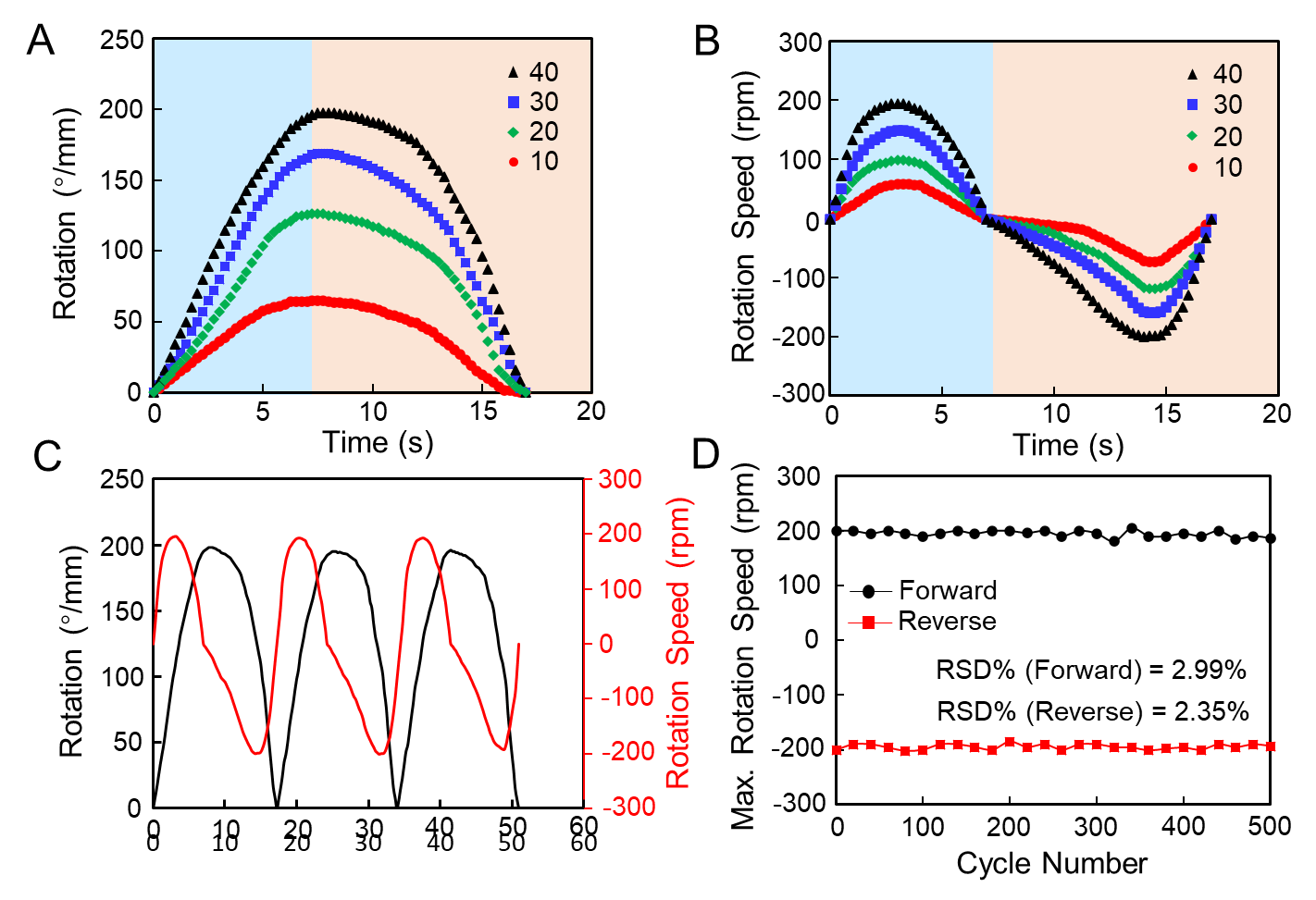
图2. 扭曲结构人造肌肉的旋转运动表征
图3为伸缩型人工肌肉的性能数据。在人工肌肉的测试过程中,通过调节外加应力,测得最大的收缩冲程为33%。当外加应力为20 MPa时,最大收缩做功为392 J/Kg (图3A)。在湿度驱动实验和水份驱动实验中,人工肌肉的最大收缩冲程和收缩做功基本没有差别。500次循环实验表明该人工肌肉具有很好的循环稳定性(RSD=1.37%)(图3B,3C)。与其他湿度或水份驱动的人造肌肉比较,荷花纤维人造肌肉具有优异的收缩冲程和收缩做功能力(图3D)。
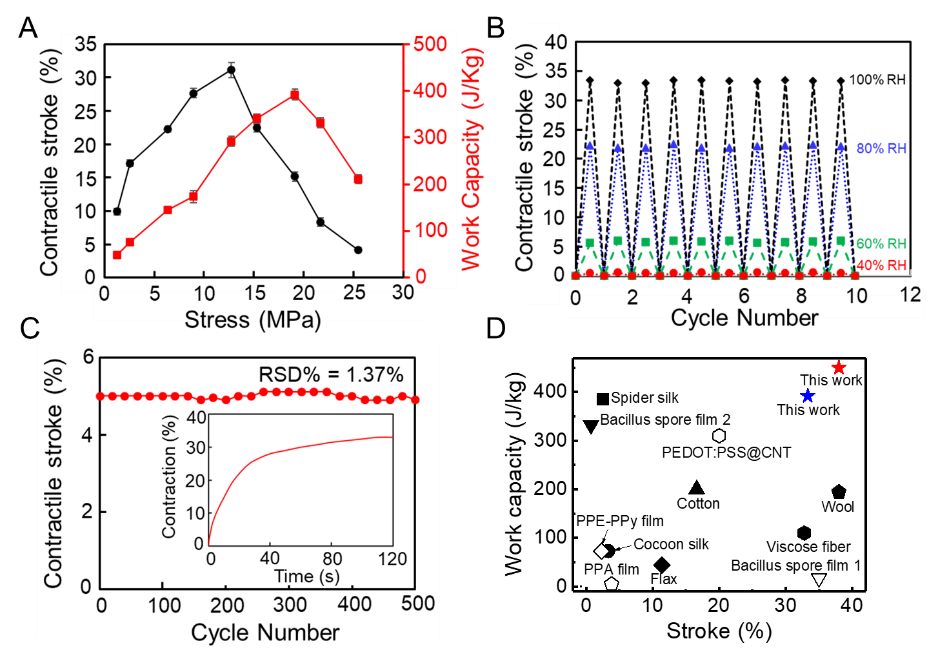
图3. 螺旋结构人造肌肉的伸缩运动表征
当把伸缩型荷花纤维人造肌肉集成到人造手臂(图4A,4B)中,30毫米长的肌肉能够在30秒内将上臂和前臂间的角度缩小40°,并把2.6 MPa(3克)的重物拉高7.8毫米。当将其集成到智能织物中(图4C,4D),能够在遇水2秒钟内将织物长度缩短65.7%。将这些人造肌肉应用于根据个人出汗情况能够自主调节孔隙率的智能织物在未来具有很大的前景。例如可以通过设计纺织结构,当肌肉纤维收缩时增大织物的孔隙率以增强汗液挥发(封面图)。这些全新的性质为荷花纤维这种古老的材料应用于现代服装带来了全新的可能性。

图4. 人造肌肉用于人造手臂和智能织物
原文链接:https://doi.org/10.1021/acsami.0c20456
- 东华大学张青红教授等 AFM:基于高强导电同轴MXene纤维的多响应人工肌肉 2026-06-15
- 华南理工刘伟峰、广东工大邱学青 AFM:木质素构筑动态液晶双网络 - 打造高性能光热驱动人工肌肉 2026-03-27
- 武汉纺大夏治刚/南开刘遵峰/中国药大周湘 Matter:扭转自振荡人工肌肉 2026-02-08
- 浙江大学柏浩教授团队《Adv. Mater.》:白鲢鱼鳔“以柔克刚”的各向同性抗疲劳机制 2026-07-24
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
