软体机器手具有很好的柔软性和可适应性,能够实现连续变形,在人-机器人以及环境-机器人的交互应用中,可以有效避免对人和物品等造成可能的伤害和损坏;更重要的是,软体机器手能够在较为简单的控制策略下,轻松实现与复杂形状的物体的贴合(共形)接触。因此,能够灵巧的抓取物体软体机器手近来受到人们广泛关注。
近日,美国密歇根州立大学曹长勇教授团队设计了一种智能软体机器手及其软体执行器。该智能软机器手基于摩擦纳米发电机(TENG)以及绳线(肌腱)驱动方式,具有快速响应、精确控制、自供电式的压力和弯曲感应功能、以及能量收集功能等特点(图1)。手指状软体执行器采用模块化设计,通过微型直流电动机驱动牵引内部绳线从而使机器人手指产生弯曲变形,并依据人手指的构型,软体手指通过多个三角形切口将弹性体分段从而有利于弯曲以及与目标物体的共形接触。摩擦皮肤贴片表面排列有微型金字塔结构,具有高灵敏度以及较高的表面兼容性,并可以通过TENG自发电压信号来实现接触压力信号监测,包括接近、碰触和压力感应。该设计中,安装于手指执行器内腔的摩擦起电片通过一对接触片间的接触程度大小来反馈其弯曲状态。实验表明,装有摩擦纳米发电机构件的智能软体抓手可以轻松实现手指表面接触压力与弯曲程度的信号监测以及能量收集。此外,该抓手可进一步反馈其实际抓取过程(接近,抓取与紧握,以及张开与释放等)中的状态,并且进行基本的判断并识别抓取物体的轮廓特征以及重量。该软机器手能够拾取各种物体,同时提供感官反馈并产生电能,未来在机器人-人和机器人-环境交互应用中将具有巨大的潜力。
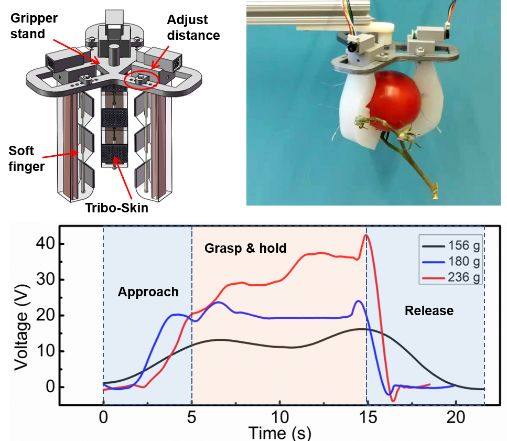
图1. 智能软体机器手通过摩擦纳米发电机(TENG)实现接触力以及弯曲程度实时信号监控和能量收集,可以实现果蔬采摘和筛选。
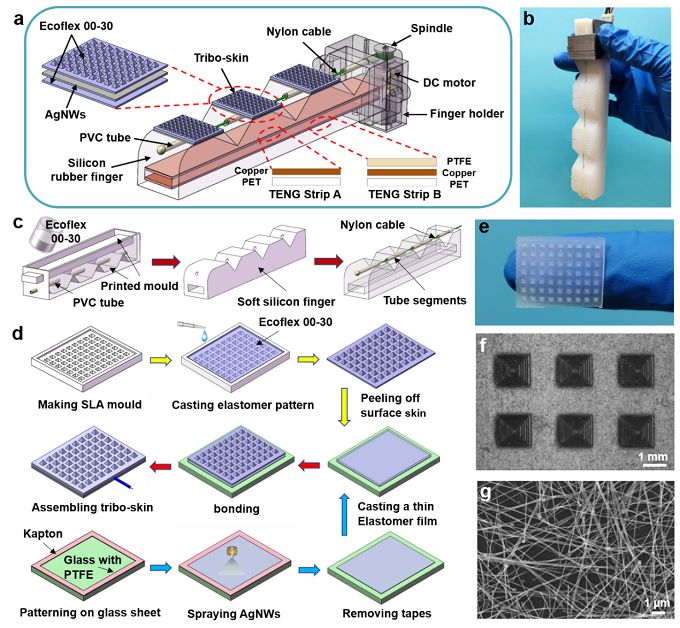
图2. 设计与制备带有摩擦起电皮肤Tribo-Skin的智能手指状软体执行器。(a)装备有摩擦起电皮肤与内部摩擦纳米发电机片的可用于能量回收以及传感的绳线式执行器的设计示意图。(b)装配完成的软体指状执行器。(c)执行器主体的制造过程示意图。(d)摩擦起电皮肤贴片的制造过程示意图。(e)未喷涂银纳米线电极的软体皮肤贴片。(f)通过在摩擦起电皮肤表面排列微型金字塔结构增强其摩擦起电性能。(g)PTFE薄膜上的喷涂的银纳米线薄膜电极的SEM图像。
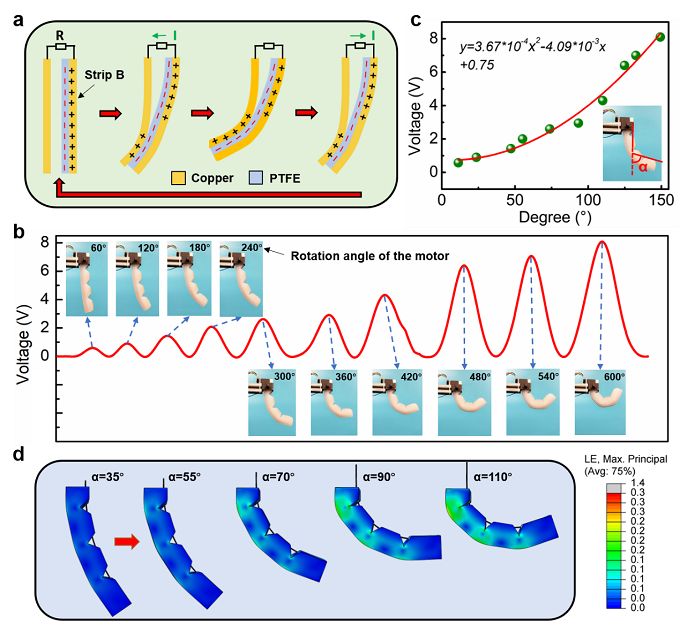
图3. 软体执行器内腔的摩擦纳米发电机TENG的工作原理及其性能。(a)内部摩擦纳米起电片的工作原理示意图:执行器的弯曲将会使得起电片B(与软体手指内腔贴合)与起电片A(与打印的手指支座相连)相接触并且两者接触面积会随着执行器弯曲程度增大而扩大。(b)内部摩擦纳米发电机片峰值电压与指状执行器弯曲程度(由直流马达转角大小衡量)的关系。(c)内部摩擦纳米发电机片峰值电压与指状执行器弯曲参数α(初末节指骨夹角)的关系以及相应的拟合曲线。(d)有限元分析得到的软体执行器在不同弯曲程度下的应变分布。
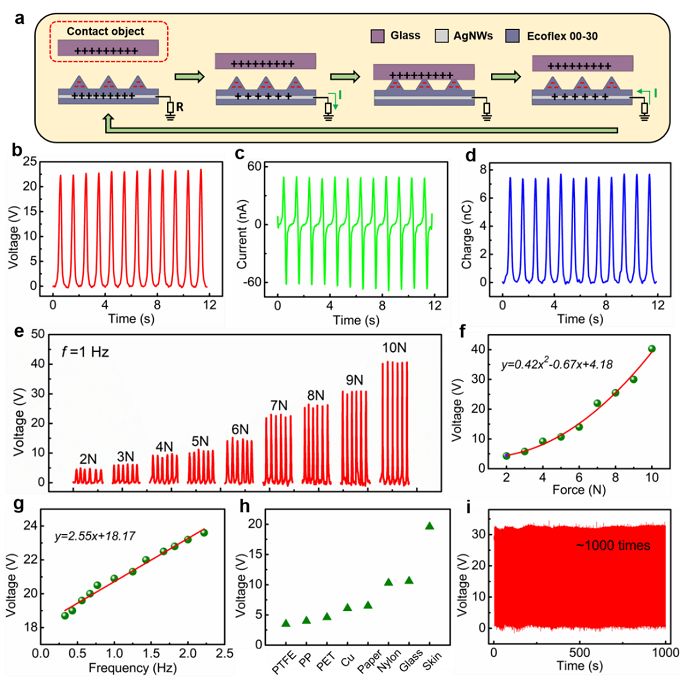
图4. 软体摩擦起电皮肤Tribo-Skin的工作原理及其性能。(a)摩擦起电皮肤的工作原理示意图:借助表面微型金字塔结构所表现出与接触面积以及挤压深度相关联的电压输出特性。8 N作用力以1 Hz频率挤压摩擦起电皮肤所产生的(b)开路电压,(c)电流以及(d)转移电荷。(e)不同幅值的挤压力使摩擦起电皮肤产生的开路电压大小(频率保持1 Hz)。(f)摩擦起电皮肤峰值电压与接触力大小的关系及相应拟合曲线(频率保持1 Hz)。(g)挤压频率与输出电压的关系(作用力保持7 N)。(h)摩擦起电皮肤的电压输出特性与不同接触材料相关。(i)摩擦起电皮肤稳定性测试结果。
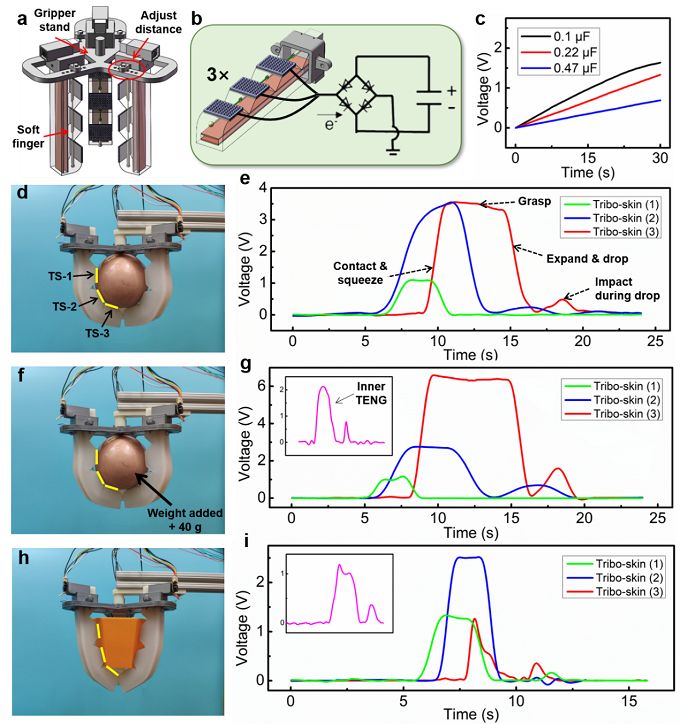
图5. 由三个执行器组装的智能软体机器手的综合性能。(a)软体机器手的设计示意图,其中三个指状执行器互成120°分布并安装在3D打印支座上。(b)基于摩擦起电皮肤能量收集系统的电路示意图。(c)使用不同电容的抓手充电曲线。(d)抓取塑料球体。(e)由三块摩擦起电皮肤产生的实时电压信号,体现了包括接触与挤压,抓取,张开与释放的过程。(f)抓取质量增加后的相同塑料球体。(g)由三块摩擦起电皮肤产生的实时电压信号包括内部摩擦纳米发电片的电压信号。(h)抓取空心六棱柱。(i)由三块TENG皮肤产生的实时电压信号以及内部TENG的信号。
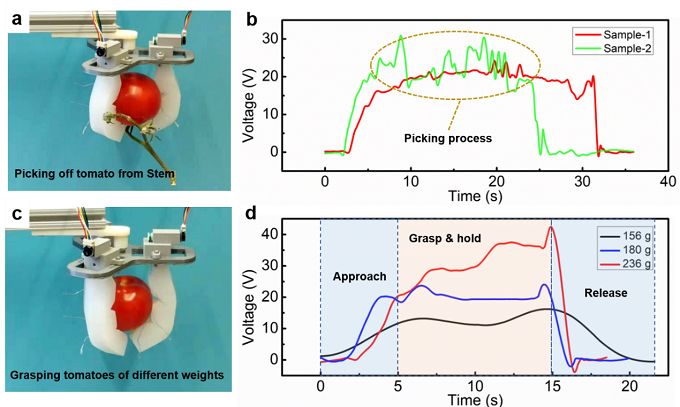
图6.智能软体机器手抓取并采摘西红柿的实验验证。(a)抓取位于茎秆上的西红柿。(b)采摘过程中,摩擦起电皮肤传感器产生的实时电压信号,包括接近、抓取与紧握以及释放过程的信号变化。(c)抓取不同重量的西红柿。(d)抓取过程中,摩擦起电皮肤产生的实时电压信号,验证其识别目标物体重量的能力。
以上相关成果发表在国际著名期刊Advanced Materials Technologies上。论文共同第一作者为密歇根州立大学博士生陈守锷与博士后逄尧堃博士,通讯作者为密歇根州立大学曹长勇教授,密歇根州立大学谭晓波教授和南方科技大学袁鸿雁教授为论文共同作者。
论文链接:
S. Chen, Y. Pang, H. Yuan, X. Tan, C. Cao. Smart Soft Actuators and Grippers Enabled by Self-Powered Tribo-Skins. Advanced Materials Technologies,2019. https://doi.org/10.1002/admt.201901075
课题组网站:www.caogroup.org
- 济大王鹏/浙理工孟垂舟/河北工大刘腾 Nano Energy:墨水直写机制备的具有表面螺旋结构多层电荷动态平衡非接触摩擦纳米发电机用于人机交互 2026-04-09
- 北化许海军教授团队 CEJ: 低成本原位光催化技术突破摩擦纳米发电机高性能电极瓶颈 →在疏水性聚合物表面原位生长银纳米颗粒电极 2025-08-07
- 福建理工大学陈汀杰/彭响方/林肇星 CEJ:分层多孔TPU@CNT海绵通过双接触电气化和自供电传感应用实现高性能摩擦纳米发电机 2025-08-03
- 西安交大邵金友、田洪淼团队《Mater. Horiz.》:开发出基于多功能智能皮肤的自适应变色系统 2023-04-05
- 格拉斯哥大学研发新型人造智能皮肤,或让机器人也有触感 2018-07-04
