无定形软体机器人指的是可以根据所处的地理环境,自由任意的改变其结构和外观,具有运动能力、变形能力和传感测量能力的一类机器人。其在生物医学领域和安全领域也有着自己独有的优势。在生物医学领域,无定形软体机器人在可控药物释放以及植入式医疗机器人等方面有着巨大的潜力,微型软体机器人可以通过注射方式随血液进入血管,借助传感元件和包载药物,对血液和血管道进行测量,实现定点可控药物释放等功能。安全领域,无定形软体机器人能有进入人类无法进入或者危险的环境,并对环境中物理、化学和生物等信号进行检测,环境适应能力强,在排险、探伤、侦查、军事安全领域具有广泛的应用前景。
柔性电子技术近年来发展迅速。柔性电子器件具有超薄、柔性、可延展的类皮肤特性,并根据集成的元件提供复杂的功能,如传感,显示,计算以及能量收集和存储等。柔性电子器件主要贴附于或者集成在有机体、机器和电子产品上工作,这些依附物往往位置固定,其活动范围受限。受自然界水母等生物有机软体的启发,软体机器人可以通过反复的形状改变进行可逆变形,同时可以实现运动、抓取、运输和触觉感应等功能。然而现有软体机器人的这些功能实现主要依赖于传统的刚性传感元件和电路,还没有做到机体和功能电路的全柔性构造。因而,一种全柔的功能软体机器人亟待实现,以满足现代化生产生活的多元化需求。
针对以上问题,天津大学精仪学院生物医学柔性电子实验室的黄显教授受自然界中身体极为柔软的水母、轮虫等腔肠动物或浮游生物的启发,结合柔性电子的研究背景,提出一种全新的无定形软体机器人-智能液滴,利用液滴和柔性电子器件实现了复杂环境下机器人输送、运动、变形、传感测量和多任务执行(图1a)。研究团队利用液滴的柔软无定形特性和柔性电子器件的超薄柔软特性,构建了一种新型的软体机器人-智能液滴,首次实现了软体机器人运动载体和功能测量器件的全柔性化和可编程控制。在该研究中,团队基于微纳加工技术制作出超薄(厚度小于10微米)多功能柔性电子器件(图1b),利用液滴浮力和表面张力等特性,将柔性电子器件悬浮于液滴表面,通过改变液滴种类和器件设计(图1c,d,e),实现不同环境和控制条件下智能液滴的运动、变形和传感测量等功能。
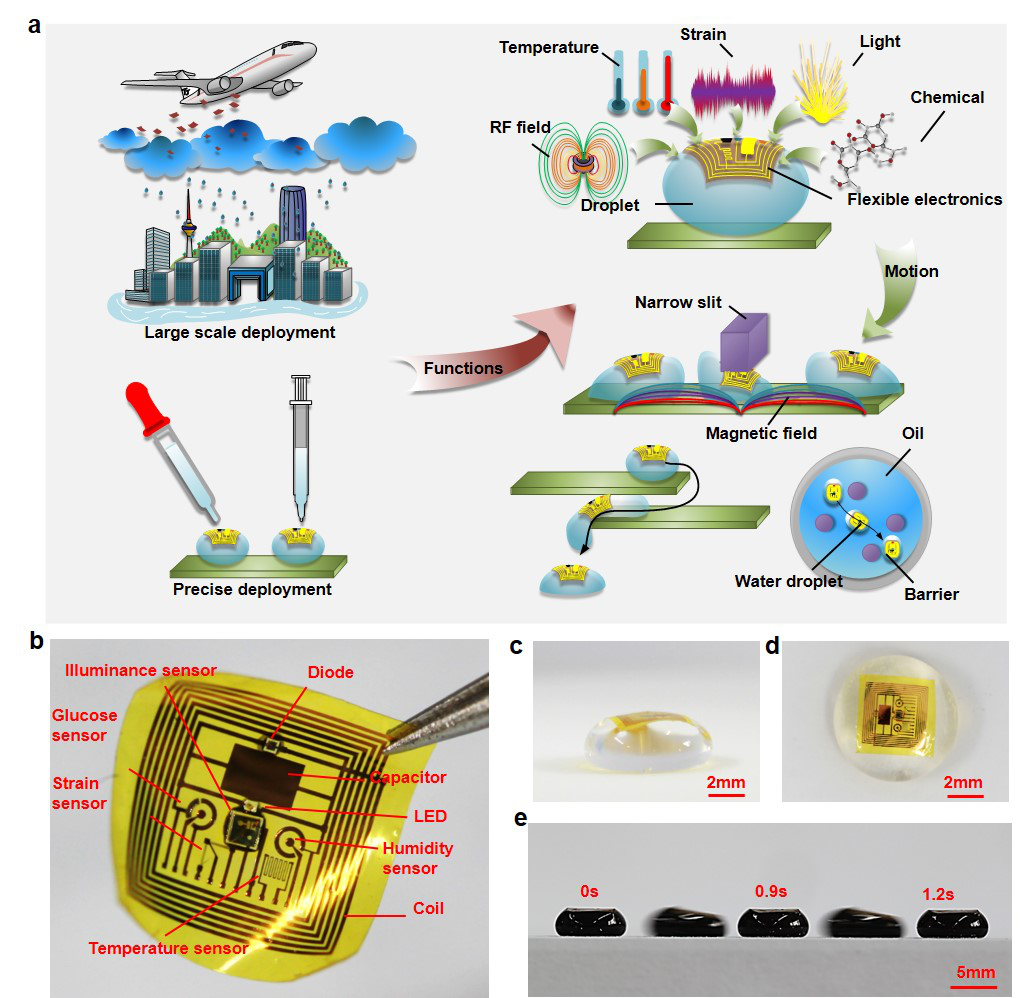
图1智能液滴基本概念图
研究团队在水液滴中掺入了四氧化三铁纳米颗粒,在磁场条件控制下,智能液滴可以以226cm/min的速度进行可编程化运动(图2a)。运动过程中,遇到细小夹缝、凸起表面时,智能液滴可以凭借全柔性化构造,改变自身形状通过障碍物,到达指定位置后还可以恢复成原来的形状,展现了良好的运动和变形特性。不仅如此,当环境改变时(空气介质转为油性介质),智能液滴借助油水不相容原理,依旧可以在油性环境中自由运动(图2a,b,c,d,e)。在此运动和环境适应能力的基础上,智能液滴可以将电子器件投递至目标指定位置并完成功能组装(图2f)。
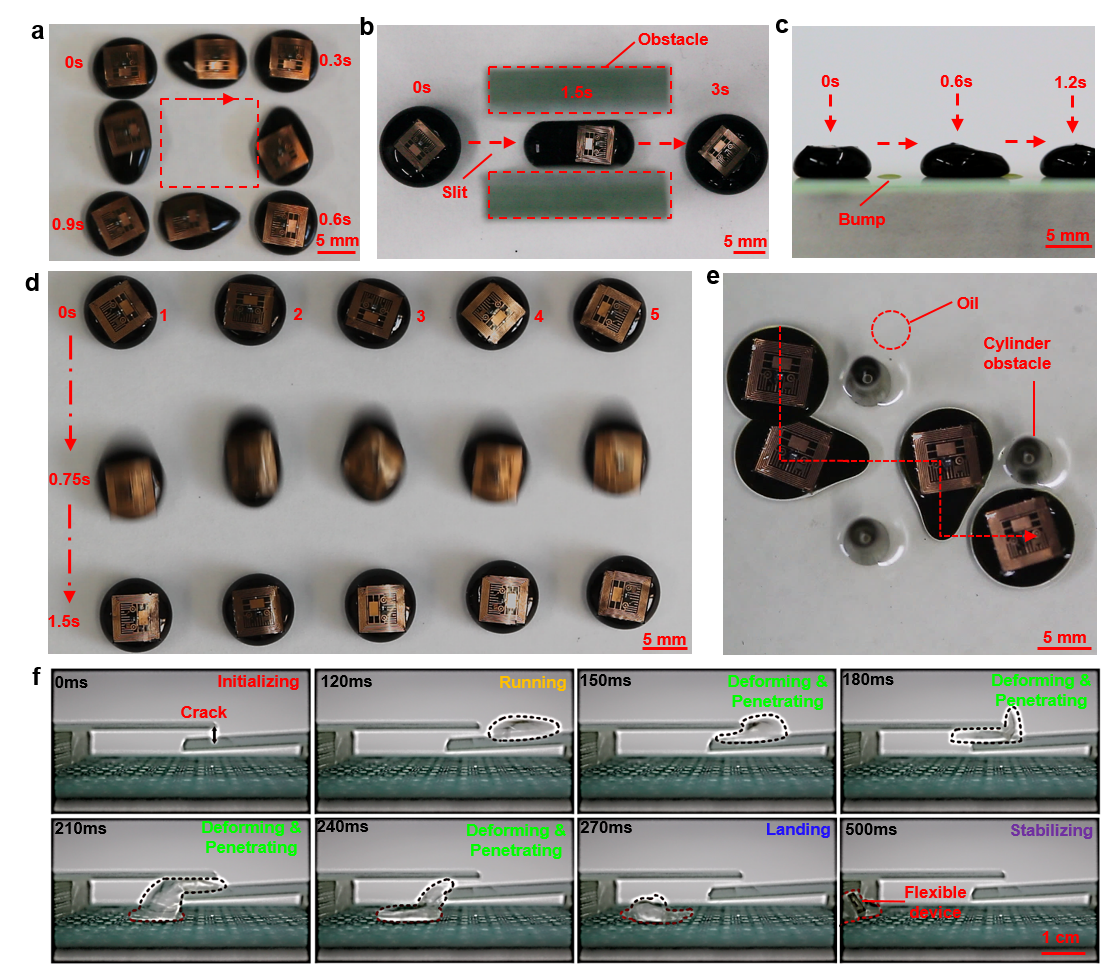
图2智能液滴可编程运动及变形图
除了具备良好的运动和环境适应能力之外,智能液滴还可以对环境中的物理、化学和生物等信号进行测量和采集。团队在柔性电子器件上集成了多种传感器,如温度传感器、湿度传感器、光学传感器、应力传感器、葡萄糖传感器、食品毒素传感器和无线能量采集模块。实现了智能液滴静态和动态状态下的传感测量、相变和环境能量采集(图3)。
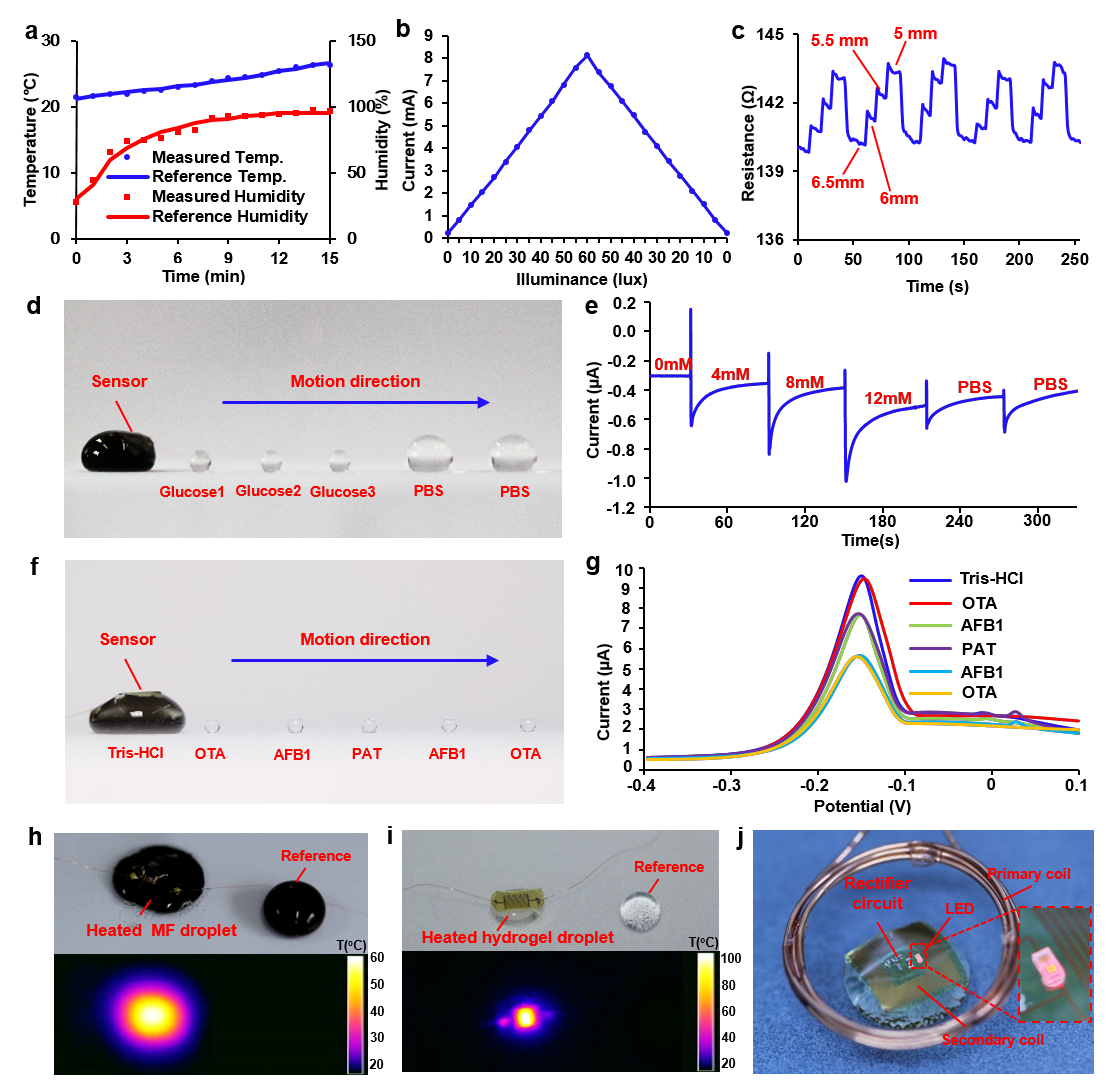
图3 智能液滴静态/动态传感测量图
将液滴与柔性电子相结合是一种全新的构建全柔性软体机器人的方法,该方法为全面实现复杂环境下可独立工作的软体机器人奠定基础,在国际上尚未有与之类似的研究,体现了其先进性和颠覆性。同时,这种方法给时间和劳动消耗型研究带来了便利,高通量可编程控制的特点使其可应用于基因测序、化学合成、药物递送和微组装等需要精确操控和持续检测领域,具有十分重要的科学意义和应用价值。
相关工作发表已于10月30日线上发表于工程科学领域顶级的国际期刊Advanced Science(影响因子15.804)。博士研究生周明行为本文的第一作者,黄显教授为本文的通讯作者,实验室的徐航博士为本文的共同通讯作者。上述工作得到了国家自然科学基金(No. 61604108),天津自然科学基金(No.16JCYBJC40600)和天津大学自主创新基金的支持。
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/advs.201901862
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 厦门大学廖新勤团队 Nature子刊: 柔性电子围巾读懂无声语言 2026-06-06
- 中山大学付俊教授团队 AFM 综述:超薄可穿戴柔性电子器件及其智能健康监测应用研究进展 2026-05-30
- 苏州大学张晓宏教授课题组招聘柔性电子器件方向博士后 2026-05-06
