微米马达在环境修复、靶向给药和无创手术等领域具有广阔的应用前景。然而,在人工微米马达制备时,在如何改进结构和材料成分以提高其运动性能和多功能性方面还存在不足。
鉴于此,香港大学机械工程系王立秋教授团队提出了一种基于液滴微流控的微纤维约束方法,来精确设计和制备三维各向异性的微颗粒人工马达,可实现对微米马达的形状、结构、尺寸和组分进行独立地系统地调控,从而为研究各项参数对微马达运动的影响提供了一项平台型的制备技术,使微马达的优化成为可能。制备的主要思路是利用微流控技术将液滴封装在微纤维中,通过控制液滴在纤维内部的有序组装及微纤维干燥过程中的体积收缩程度,精确控制微液滴的变形,固化液滴后产生各向异性的微颗粒马达。实验中演示了基于光和热固化材料的微马达的制备。微马达结构的各向异性源自于微液滴模板的可控变形,而材料的各向异性来源于功能化的乳液模板。通过控制油滴产生的频率,油滴/纤维相体积分数,以及不同的微纤维干燥方法,可以控制微马达的形状(纺锤形、鼓形、齿形、多层结构、半纺锤体、半鼓形)。通过选择不同的乳液模板及不同的材料,可以使制备的微马达在大小、结构(Janus结构、核-壳结构、空心结构、 新月形纺锤体结构,多层结构等)和化学成分(表面或内部结构)上呈现出多样性。
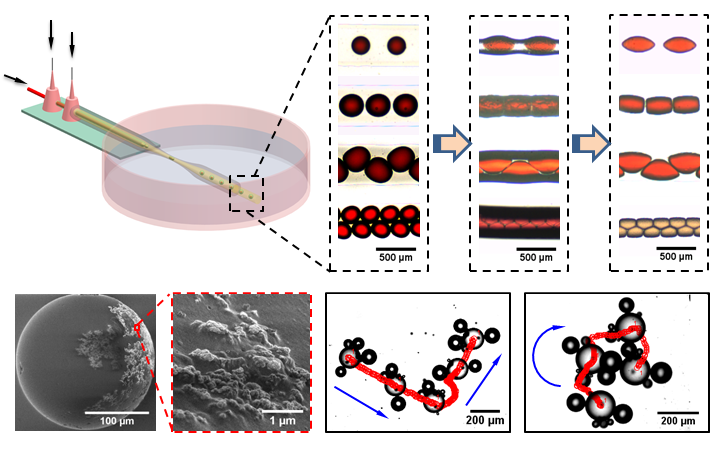
通过掺杂铂和磁性纳米粒子,可使制备的微马达具有催化推进和磁性向导双重功能,其中铂催化双氧水的分解用于推动马达,而磁性颗粒允许在外部磁场下控制马达的运动,最终使得微马达能够执行精准捕获、熟练运送和随需释放货物的任务。除了通过外加磁场,微马达运动的控制还可通过改变外部环境的几何约束来实现。实验中发现,微马达的推进来源于氧气气泡的非对称脱离和自电泳的双重结合,微马达的大小及铂纳米颗粒的掺杂量都可用以控制马达的运动速度。
相关成果以“Engineering Micromotors with Droplet Microfluidics”为题,近期在线发表于国际期刊《ACS Nano》(DOI:10.1021/acsnano.9b00731)上。博士生周春梅和博士后朱平安是该论文的共同第一作者,王立秋教授是该论文的通讯作者。
- 江西师大谭宏亮教授团队《Nat. Commun.》: 具有ATP响应性的智能前药体系用于抗菌和创面细菌感染治疗 2022-08-14
- 华南师范大学水玲玲教授课题组在利用液滴微流控技术构建跨尺寸多层微纳米结构材料领域取得突破 2019-06-04
- 清华大学郭永研究员团队研发出“一步法”超快速微液滴芯片键合和表面疏水改性方法 2018-11-22
- 西安交大李涤尘/贺健康团队 Adv. Mater.:3D打印微纤维支架引导高密度定向心肌组织构建 2025-01-17
- 东华大学熊佳庆课题组 Adv. Mater.:微纤维两栖软体机器人实现电磁辐射动态感知 2024-09-30
- 天津工业大学王润、刘雍/南开大学刘遵峰《Adv. Sci.》:基于氢键纳米团簇的仿蛛丝水凝胶微纤维 2024-04-21
- 瞿金平院士/牛冉研究员 CEJ:光热驱动微马达用于增强盐湖卤水中的锂提取 2025-08-31
