哈佛大学和波士顿大学合作打造新型软体机器蜘蛛
2018-08-09 来源:中国聚合物网
由哈佛大学和波士顿大学工程师组成的一个研究团队已经借助一种全新的制造技术创造出了一种高度灵活机动的微型软体机器人。
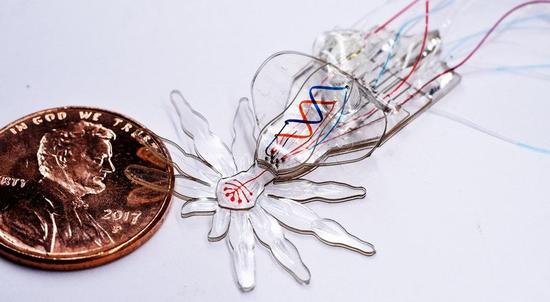
这个过程简称MORPH(气压/液压重构的微流体折叠),它借助软印刷技术首先用硅胶打造出机器人的外形,然后使用激光精细加工技术在机器人身上蚀刻出微型通道。其中一些通道随后借助一项注射诱导自折叠技术进行密封,并使用树脂和紫外线进行愈合,从而形成最终的机器人身体。
软体机器人的其它微流体通道仍然处于开放状态,因此机器人的肢体能够借助水或者酒精来驱动并模拟澳大利亚孔雀蜘蛛的表现。这项研究已经发表在了《先进材料》杂志上。
哈佛大学怀斯研究所的博士后研究生,波士顿大学现任副教授,研究的合著者Sheila Russo称:“最小的软体机器人系统仍然趋向于很简单,通常只有一度的自由度,这意味着它们只能够进行特定形状的变化或者特定类型的运动。”
Russo教授称:“通过融合三种不同的制造技术我们研发出了一种新型的混合制造技术,借助这项技术我们只使用硅橡胶就打造出了具有18度自由度的软体机器蜘蛛。它能够在结构、动作和色彩等方面发生变化,而且在微米水平上也具有细小的特征。”
据研究人员称,这是研究人员首次在这么小的规模上创造出具有这种能力水平的软体机器人。研究人员认为,这项研究有着潜在的外科手术学和生物医学应用,而且也可以应用于可穿戴技术。
怀斯研究所的创始人兼主管,生物工程学教授Donald Ingber称:“这种MORPH方法能够为研究人员打开软体机器人研究的新领域,尤其是那些依赖于更小体型和更灵活机器人的医学应用,这种机器人将能够带来一种全新的内窥镜检查和显微外科手术。”
版权与免责声明:本网页的内容由中国聚合物网收集互联网上发布的信息整理获得。目的在于传递信息及分享,并不意味着赞同其观点或证实其真实性,也不构成其他建议。仅提供交流平台,不为其版权负责。如涉及侵权,请联系我们及时修改或删除。邮箱:info@polymer.cn。未经本网同意不得全文转载、摘编或利用其它方式使用上述作品。
(责任编辑:xu)
相关新闻
- 大连海事大学徐敏义教授、邹永久副教授团队 Small:一种用于机械状态监测的柔性自驱动导电海绵-硅胶基摩擦电式振动传感器 2024-03-25
- 中科院深圳先进院胡友根、林志强《Small》:高效吸波导热多功能弹性材料的设计 2022-12-01
- 纳米能源所王中林院士和吴治峄研究员团队 Adv. Mater.:开放环境下的触觉传感系统 - 迈向简单高效的材料辨识 2022-05-18
- 合工大胡颖、常龙飞/赵玉顺《Adv. Funct. Mater.》:静电振荡驱动的具有光调控运动的仿海豹柔性机器人 2025-08-09
- 南加州大学赵航波团队《Sci. Adv.》: 基于三维折纸的可拉伸应变传感器 2023-08-26
- 西湖大学吕久安团队《ACS AMI》:光驱动自持续波动柔性机器人系统 2022-05-17
