
为了演示一种制造兼容、可控机器人结构体的全新方法,研究人员构建了一个能够自主折叠的兔子、金枪鱼和海星的 3D 模型。这些构造物浸泡在热水之后,会从平面形式上折叠起来。
Cynthia Sung 之前曾是麻省理工学院 Daniela Rus 团队的一员,如今已经成为了宾夕法尼亚大学的一名教授。本周二,在机器人与自动化大会(ICRA)上,他展示了一个制造兼容且可控机器人结构体的全新方法,并称之为附加自折叠技术。受到折纸手工的启发,该技术可以利用具备自折叠功能的 2D 材料创造 3D 形状,而你所需要做的,就是把它们放进热水里即可。
你需要先设计好一个对象的 3D 模型,然后使用软件把对象转化成为很多不同的层,而且每一层都需要和对应的上一层及下一层联系在一起,但是却要有一点折叠皮瓣。一旦你已经准备好了所有的设计,你就可以使用一个乙烯切割机在一个聚脂薄膜和聚氯乙烯的“三明治”上打印出来。
在折叠之前,你首先得到的可能会是一个你期待所创建的 3D 对象连接横截面的、又长又瘦的条带,但是一旦你把它放进到一个接近沸腾的热水里,聚氯乙烯(PVC)就会受热,然后每一个部位都会被收缩,然后只需短短几秒钟,就能变成预先设定好的形状。
不仅如此,该软件还有另一个功能,可以在设计对象内加入一种所谓”对抗性“(使用的是和钓鱼线一样的原材料),这样的效果就是,当一侧被压扁,另一侧就会被弹起,从而形成一个受控曲线。
这些研究人员使用了能够自我附加折叠功能的解决方案,制造了一个完整的海星模型(下图a),这个模型拥有靠伺服电机控制的腱体,允许其执行不同的云端(下图 b-g)。
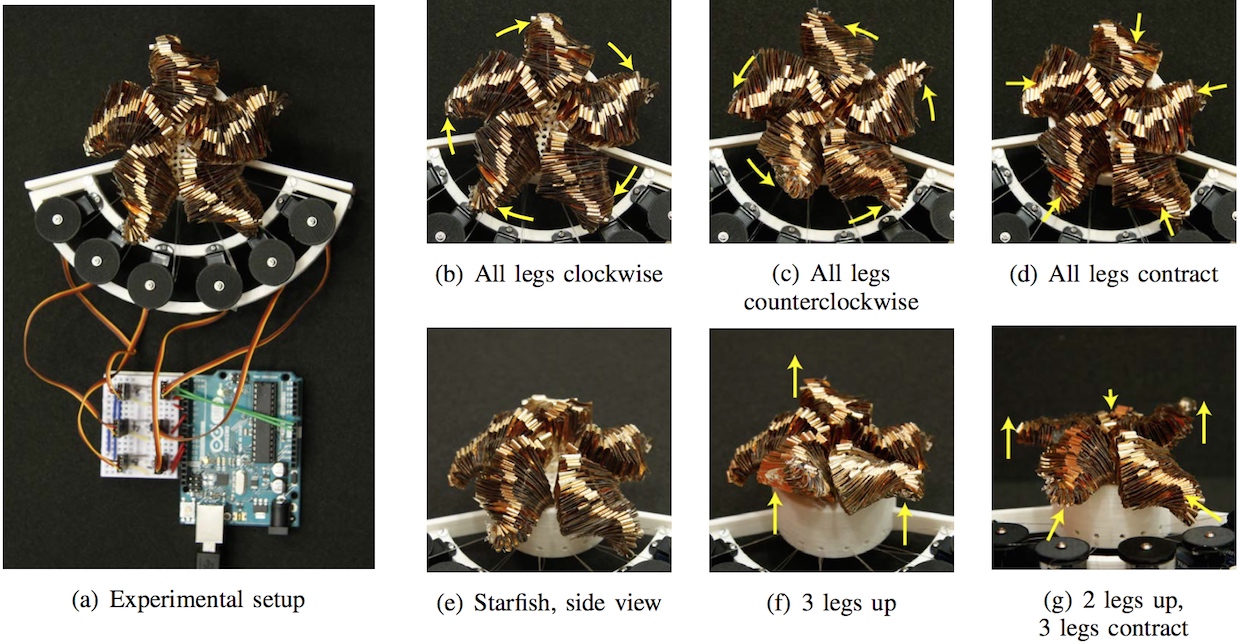
机器人海星在它的五条腿(或是五个首笔)中,每一个都使用了四个螺丝来驱动两个维度云端。制作每一个海星的腿大约只需要 50 分钟,你真的不需要考虑太多它的运动范围。通过将肌腱组合在一起,所有的腿就能依靠六个舵机控制,朝着顺时针或是逆时针方向弯曲,同时也能将组合中的两条或三条腿向上或向下弯曲。如果把这个解决方案应用到一个五指操控器上,而不是设计一个海星,相比会发挥更大的用途。
利用这个解决方案,制造相对复杂的机器人,特别是当你需要制造一些对重量和体积有要求限制的机器人情况下(比如制造一些在太空旅行获行星探测条件下使用的机器人),整个制造速度会变得更快,而且也会更加简单。你所要做的,只需携带一些材料和切割器,然后把你所需要的机器人设计好,甚至可以把他们“压扁”然后要用的时候一打印,即可使用。
研究人员正在探索在制造过程中嵌入肌腱的相关解决方案,虽然这种方法可能会让整个流程变得有一点复杂,但是却能让整体制造速度获得显著提升。
- 清华大学许华平课题组 Matter:可用于多种基材的模块化形状编程方法 2024-01-19
- 苏黎世联邦理工学院顾红日博士等《Nat. Commun.》:磁性软体机器人链可自折叠成复杂稳态结构 2023-03-12
- 4D打印技术制造出复杂的自折叠结构物 2015-10-20
