清华大学赵慧婵团队 AFM:分米尺度的静电驱动柔性人工肌肉新进展
2025-01-18 来源:高分子科技
自然界中,肌肉是动物实现灵活运动和复杂操作的关键执行器。在机器人领域,研发具备类似特性的高响应速度、轻量化柔性人工肌肉一直是研究热点。介电弹性体(Dielectric Elastomer, DE)驱动器因其高能量密度、大变形和快速响应等优点,被认为是最具潜力的人工肌肉智能材料之一。其基本结构为电介质薄膜夹在柔性电极之间,通过静电力实现机械运动。然而,传统DE人工肌肉的制备尺寸受限,难以制造分米及更大尺度的多层介电薄膜结构。
近日,清华大学机械工程系赵慧婵研究团队在《先进功能材料》(Advanced Functional Materials)发表了一篇题为“Long, Fibrous, and Tailorable Dielectric Elastomer Artificial Muscles via Mask-Free Stamping of Carbon Nanotube Electrodes”的研究论文,展示了团队在分米尺度DE人工肌肉制造方面的最新进展。

使用碳纳米管柔性电极无掩膜转印法制造的长纤维状及可切分介电弹性体人工肌肉
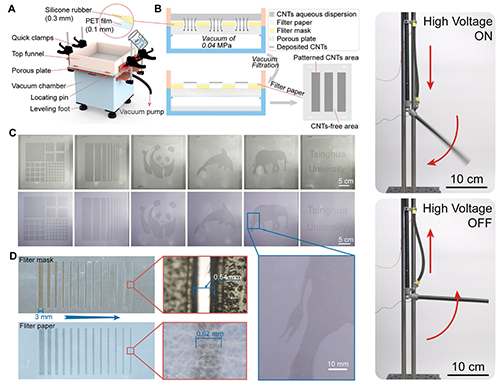
碳纳米管柔性电极图案化沉积方法及DE人工肌肉驱动的连杆模型
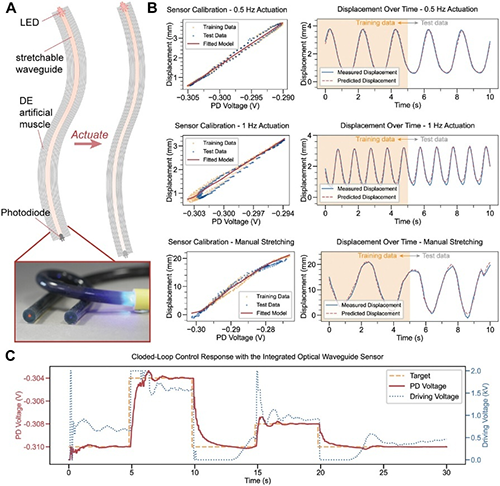
集成式柔性光波导传感器实现人工肌肉的长度自感知

通过切分得到的多个DE驱动器构建的机械装置
原文链接:https://doi.org/10.1002/adfm.202422905
版权与免责声明:本网页的内容由中国聚合物网收集互联网上发布的信息整理获得。目的在于传递信息及分享,并不意味着赞同其观点或证实其真实性,也不构成其他建议。仅提供交流平台,不为其版权负责。如涉及侵权,请联系我们及时修改或删除。邮箱:info@polymer.cn。未经本网同意不得全文转载、摘编或利用其它方式使用上述作品。
(责任编辑:xu)
相关新闻
- 南开大学马儒军教授团队《Adv. Mater.》:一种用于精准控温的点阵式主动制冷电卡器件 2023-01-27
- 南开大学马儒军教授课题组等AEM:高效静电驱动双单元电卡制冷装置 2021-03-01
- 美国加州大学洛杉矶分校裴启兵教授:具有静电驱动的高效电热冷却装置 2017-09-19
- 中科院理化所刘静/北林王磊团队 AM:液态金属“激活”铝电池新未来!Al-LM-Ti复合负极实现39000次超长循环 - 打造高安全柔性固态铝电池 2026-07-15
- 中国科大人形机器人研究院 AM:挤-拉打印实现高界面韧性柔性传感器的一体化集成制造 2026-07-12
- 北化王瑞雪、赵潞翔/北医三院司文喆《Adv. Sci.》:用于体内递送活性物质的全柔性等离子体贴片 2026-06-29
- 东华大学张青红教授等 AFM:基于高强导电同轴MXene纤维的多响应人工肌肉 2026-06-15
