电子皮肤(E-skin)在模拟人类感官系统用于假肢、人机交互和医疗保健监测方面引起了相当大的关注。然而,完全模拟皮肤功能仍然具有挑战性,因为皮肤功能可以分离刺激,如正常/切向力,接触/非接触行为,以及对高频输入的反应。有鉴于此,五邑大学罗坚义团队与澳门大学周冰朴团队合作,开发了一种基于仿生毛发-表皮-真皮-皮下组织结构的全仿生电子皮肤(FBE-skin),用于多维触觉感知。如图1所示,文中通过充分利用人体皮肤的设计理念,制造磁化微纤毛(MMCA)、导电微穹顶(MDA)和柔性电极来复制生物毛发层、表皮-真皮层和RA/SA受体。通过优化微纤毛和导电微圆顶的形态和磁/电性能,该工作进一步提高了自上而下结构中各部件的传感性能。
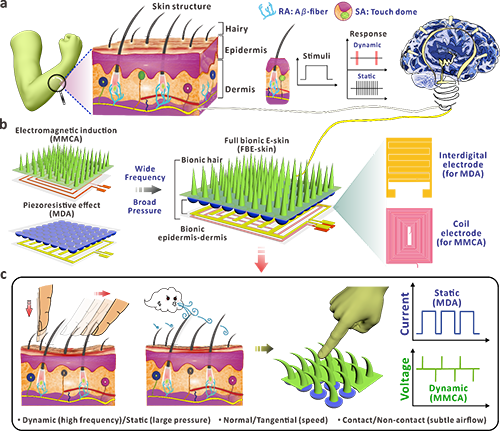
图1. (a) 具有毛-表皮-真皮层的人体皮肤和用于动静态刺激检测的RA/SA机械感受器的概念图;(b) 通过电磁元件(MMCA)和压阻元件(MDA)的耦合电子皮肤设计;(c) 电子皮肤模拟人类皮肤实现静态和动态响应的多维机械感知示意图。
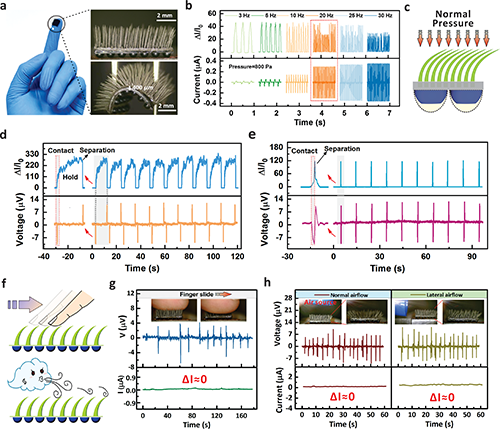
图2. (a) 典型FBE-skin的光学图像和柔性展示;(b) 频率为3 Hz ~ 30 Hz,压力为800 Pa时,FBE-skin的响应。(c) 法向压力作用下MMCA和MDA的变形示意图,及施加压力时的电流和电压信号曲线(d)有持续时间, (e)无持续时间;(f) 日常机械刺激的示意图,例如手指滑动和气流导致近端FBE-skin形态变形;(g) 接触微纤毛层而不使微穹结构变形时,手指滑动FBE-skin的响应曲线;(h) FBE-skin暴露于法向和侧向气流时的响应曲线。
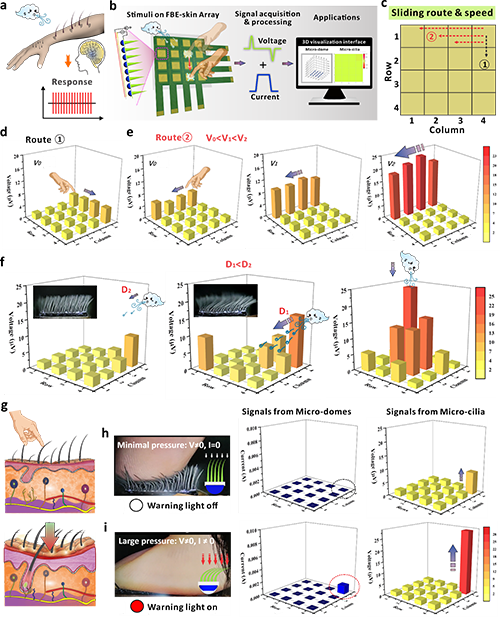
图3. (a) 人体皮肤由于存在毛层而感知切向机械刺激的示意图; (b) 基于FBE-skin阵列的感官解码和三维可视化系统概念图; (c) 用于识别不同滑动速度和路径的阵列示意图; (d)手指以路线①及V0速度滑动时三维可视化系统的响应; (e) 在不同速度下,暴露于路线②手指滑动时的响应。(f) FBE-skin在动态气流作用下的响应; (g) 对纤毛施加轻微(上)和较大压力引起皮肤明显变形(下)的示意图。(h) 对FBE-skin阵列施加最小压力时可视化系统的响应。(i) 对FBE-skin施加较大压力时可视化系统的警示响应。
原文链接:https://doi.org/10.1039/d4mh01217h
