随着机器人技术的不断发展,软体驱动器在陆地、海洋及空中领域的高速运动需求日益增长。尤其是在微型飞行器等场景中,为了克服自重并实现起飞与悬停,驱动器的输出功率密度必须超过特定阈值。然而,现有的软体机器人大多依赖于复杂的控制系统,外接或负载电源,实现无线,自主的高功率运动仍面临挑战。而通过远程能量输入来驱动的刺激响应性聚合物,则为开发新一代自主调控机器人提供了新的材料设计思路。
生物系统中的心跳、振翅、生物钟等行为依靠内在负反馈机制实现,相类似的,光响应聚合物的自激振荡通过材料和光的动态反馈,可以实现无线自主的智能驱动。其创新点是:(1)这种振荡的周期运动仅需远程能量输入,不依赖于负载电池或者额外接入电源;(2)具有自我维持性,无须人工开-关干涉,并能持续产生周期性机械输出。然而,现有的光驱动振荡器在输出功率上远未达到理想水平,难以与昆虫飞行肌肉(>29 W/kg),或现有同尺度其他机制的驱动器(压电和介电弹性体2-600 W/kg)的性能相媲美。潜在的原因是振荡的激发与维持往往需要较低刚度的响应性材料,以便更容易实现过度弯曲并产生动态非平衡运动,但较软材料仅能激发较低的频率,对于产生高输出功率(需要高频率与高振幅)来说并不理想。
为了解决这一挑战,来自加州大学洛杉矶分校的贺曦敏教授课题组提出了一种全新的光驱动振荡器材料设计,灵感来源于昆虫飞行肌肉的两组对抗性肌肉结构:背纵肌使翅膀向上运动,纵向肌肉使翅膀向下拍打。这两组肌肉交替收缩,帮助昆虫快速、高效地振翅飞行。相应的,团队提出了一种由两层光响应液晶弹性体(LCE)与非活性弹性体(PDMS)组成的三明治对抗结构振荡器设计方案,称为FLaPTOR(Flapping LCE-and-PDMS Trilayer Oscillatory Robot)。两片 LCE 膜在恒定光照下进行对抗性运动,相互交替工作实现驱动器的周期往复振荡。这种自激振荡结构与单一材料设计不同,特意引入了一定比例的非活性材料,反常性的显著提高了输出功率密度,达到33 W/kg,可与昆虫飞行肌肉的功率输出相媲美,相比于同材料的其他结构提升了275倍。本工作通过实验现象结合多物理场仿真,对其振荡的光热转换,热致形变场,传热,阻尼与几何参数多角度分析解释。此外,该结构对输出功率的提升可广泛适用于不同液晶弹性体和非活性弹性体的化学成分和合成过程。
FLaPTOR不仅能够在广光谱,非偏振光条件下运行,还具备多功能可集成性,包括本体的感知驱动,与集成于振荡器中的压电/热电纳米发电机。基于该技术,FLaPTOR能够实现多种形式的高速机器人运动,如扑翼帆船前行和陆地步行。最后,课题组对FLaPTOR扑翼模式进行了升力测试,其平均升力可达147 μN,其推重比达到了0.32,标志着无线自主的可持续振荡驱动器技术的突破。
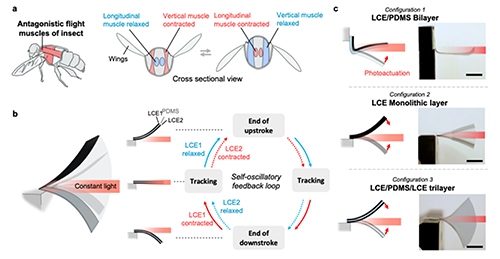
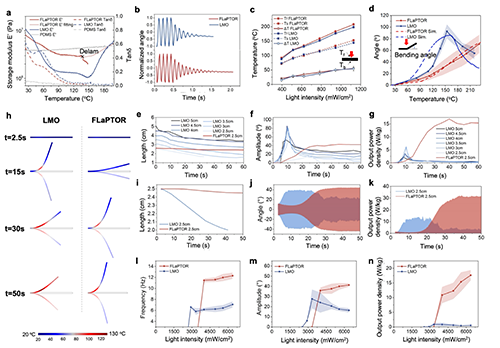
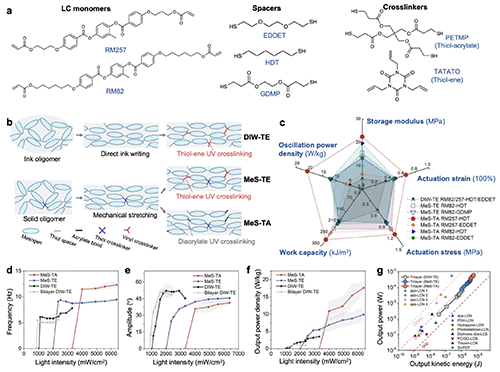
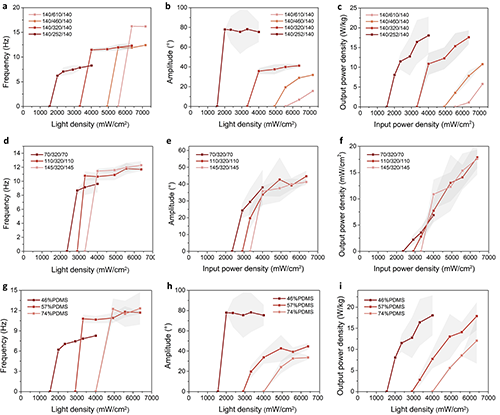
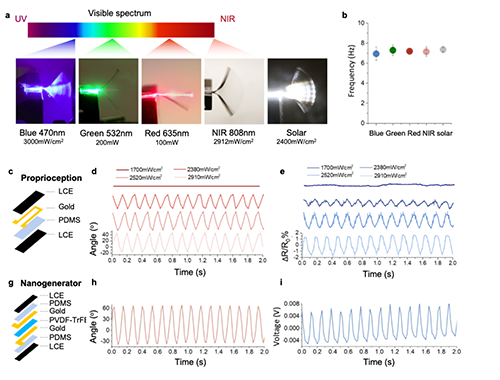
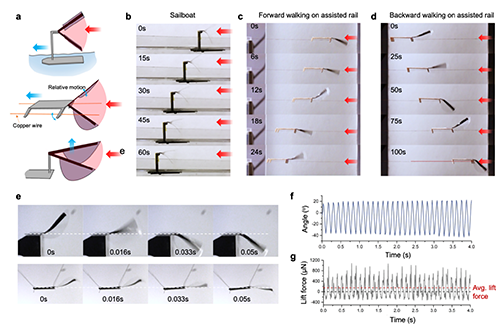
图6. FLaPTOR扑翼振荡应用。(b)帆船运动的时间分辨快照;(c,d)基于 FLaPTOR 扑翼的步行器向前和向后移动的快照;(e)扑翼驱动器在一个周期内的时间分辨快照,包括约束模式和半约束模式。(f)FLaPTOR扑翼驱动器的角度变化。g)FLaPTOR 扑翼驱动器产生的瞬时升力。
原文链接:https://www.nature.com/articles/s41563-024-02035-3
通讯作者简介:
贺曦敏是加州大学洛杉矶分校材料科学与工程系教授和加州纳米体系研究所(CNSI)的成员。她在剑桥大学获得博士学位并在哈佛大学进行博士后研究。她的主要研究方向包括刺激响应性材料、仿生功能材料、化学和生物传感器、驱动器等,并将其应用于生物医药、环境、机器人和能源领域。她已经在Nature, Nature Chemistry, Science Robotics, Nature Nanotechnology, Science Advances等杂志发表了60余篇高水平论文、书籍和专利。她获得的荣誉包括Young Investigator Medal of the Society of Engineering Science (SES), 3M Non-tenured Faculty Award, CIFAR Azrieli Global Scholar, International Society of Bionic Engineering (ISBE) Outstanding Youth Award, National Science Foundation CAREER Award, Air Force Office of Scientific Research Young Investigator Program (AFOSR YIP) Award, Hellman Fellows Award, 以及UCLA Faculty Career Development Award。她的关于高强韧水凝胶,自调制材料,人工向光材料,及柔性机器人等研究获得了一系列地区和国际的奖励,并且受到了百余家新闻媒体报道。
- 西安交大郑海丰教授团队 Angew:自然光驱动共轭微孔聚合物合成 - 实现真实塑料废弃物高效光催化升级回收 2026-06-05
- 东南大学李全院士、陆海峰等 Adv. Mater.:液晶弹性体柔性复合材料光驱动热机械耦合实现了高性能热释电能量收集 2026-03-17
- 长春应化所张强、卢宇源 AFM:光驱动形状记忆超级电容器 - 可穿戴储能的安全与耐久新方案 2025-09-29
- 合工大胡颖/哈工大彭庆宇 AFM:能在低光强下工作的多角度向光自振荡器 2024-10-29
- 北化尹梅贞教授教授团队《ACS AMI》:自发且持续的湿度驱动振荡器用于能量收集 2022-09-01
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
