水污染已成为全球性环境问题,关乎社会生产安全和人类生命健康。利用水生机器人实现水体信息的主动探测和连续监测有望构建智能水生态系统,有助于提升水环境治理。理想的水生机器人,应具备主动利用环境能量、感知水体信息并实现信息反馈的能力,这有利于建立人-机-环境间的实时信息交互,对促进智能水生生态系统和环境可持续发展有重要意义。现有水生机器人通常功能单一,仅能满足运动或简单信息传感,无法有效协同水上运动、能量收集和主动传感能力,难以满足水生环境动态/连续监测需求。
近日,东华大学熊佳庆研究团队提出并证实一种可自主监测水体信息的水上机器人。作者开发了一种超轻/疏水/高电负性气凝胶,利用并行电极阵列放大连续固-液界面摩擦电效率,结合Marangoni自推动效应和固-液生电自能量传感机制,实现了水上机器的自主推进、电能采集和水体信息主动感知。区别于目前间歇性液-固接触/分离的摩擦电机制,该工作揭示了一种普适性的连续滑行固-液生电传感机制,为实现机器人自主利用环境能量并进行信息获取/环境交互提供了一种有效途径,对构建不同规模智能水生生态系统有重要启发。相关研究成果以“Self-Propelled Nanocellulose Aerogel Eco-Robots for Self-Powered Aquatic Environment Perception”为题发表在《ACS Energy Letters》上。论文第一作者为东华大学博士生张纪伟、吴梦婕,通讯作者为东华大学熊佳庆教授、俞建勇院士和中科院北京纳米能源与系统研究所王中林院士。该工作得到国家自然科学基金委(52103254, 52273244)等项目的资助。
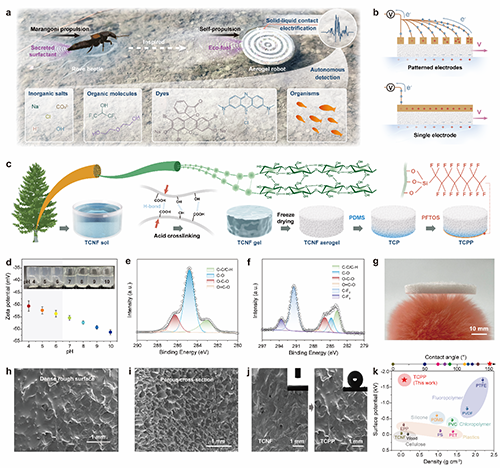
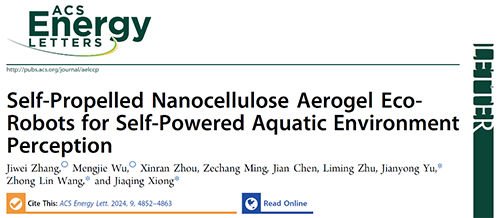
图1. 水体信息自主感知型气凝胶机器人设计
受利用Marangoni效应实现水上快速运动的隐翅虫启发,作者设想实现一种Marangoni驱动的小型超轻机器人,可以协同水上自主运动和自能量传感能力,主动利用环境能量进行水生信息感知(图1)。为此,作者开发了一种改性纳米纤维素气凝胶(TCPP),同步实现了低密度(93 mg cm-3)、稳定疏水性(接触角149.5°)和超高负表面电势(-1722.8 V);通过配置具有Marangoni效应的微型燃料泵,实现了机器人水上自主可控运动;利用并行模式图案化电极阵列放大固-液界面连续摩擦生电效应,赋予了机器人运动同步感知水体信息(例如离子盐、染料和有机物等杂质、鱼等生物)的能力。这一系统设计确保了机器人水上稳定运动,同时激发固-液界面连续产电效应,实现水上自供电及水体信息同步检测。
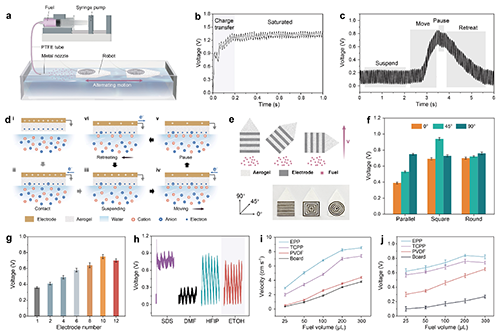
图2. 水上机器人的连续运动固-液界面产电机制
作者首先通过在机器人尾部水面注射定量Marangoni燃料,为TCPP气凝胶机器人设置了一种水上间歇运动模式,用于研究其运动产电机制(图2)。该机器人在间歇运动中的产电过程由三个阶段构成:首先,高电负性机器人悬浮在水面时,与水之间发生电荷转移并诱导建立初始双电层(EDL);然后,当机器人运动时,水中电荷的动态迁移会破坏初始EDL并诱导电子从地面流向机器人电极;当机器人停止运动时,固-液界面处会形成一个新的EDL,该EDL在机器人退回到初始位置过程中会被打破,诱导电子从机器人电极流向地面。因此,间歇运动过程中该机器人的产电机理可归因为固-液界面处EDL的周期性破坏与重建导致的电荷转移。
基于此,作者系统研究了机器人的几何形状(方形、圆形、舟形)、滑行角度(与电极阵列夹角为0°、45°、90°)以及电极阵列图案(平行、同心方形、同心圆形)对产电效率的影响。结果表明,舟形机器人具高更高的运动稳定性,且运动过程中机器人的电压输出高度依赖于电极的有效面积,具有同心方形电极阵列的水上机器人沿45°运动时可最大化电极有效面积,达到最大电学输出,具有同心圆形电极阵列的机器人电学输出则几乎不受运动方向影响。作者还研究了机器人的运动速度和气凝胶材料对电压输出的影响,结果表明具有低密度和高电负性的超疏水材料有利于实现水上机器人高速运动和较大电学输出。该机器人显示出优异耐用性,在100次连续间歇运动后其疏水性、表面电势和和电学输出可维持稳定。
图3. 机器人水上连续运动及同步电学感知能力
通过在机器人侧面配置具有Marangoni效应的微型燃料泵,作者进一步研究了机器人自主运动过程中的电信号发生机制(图3)。研究表明,连续运动时的电信号可归因于机器人速度突变导致的水中电荷迁移。具体而言,机器人在水面上持续滑行时,界面迅速充电形成饱和的EDL,当其发生瞬时减速(如遇到障碍物)时会破坏固-液界面EDL,引起水中电荷迁移,机器人电极与地面之间产生电势差,诱导电子从电极流向地面,从而改变电信号;随后,机器人继续滑行,瞬时加速将再次引起电荷迁移,诱导电子从地面流向电极及相应电信号变化。因此,电压的瞬时变化可视为有效电信号,用于机器人运动状态的自主监测。此外,水上机器人的续航时间可通过调节燃料泵与气凝胶的质量比来实现,其运动方向和轨迹可通过改变燃料泵数量和位置来调控。这种小型水体中的可控自发运动为气凝胶机器人实现水体信息的自主动态感知奠定了基础。
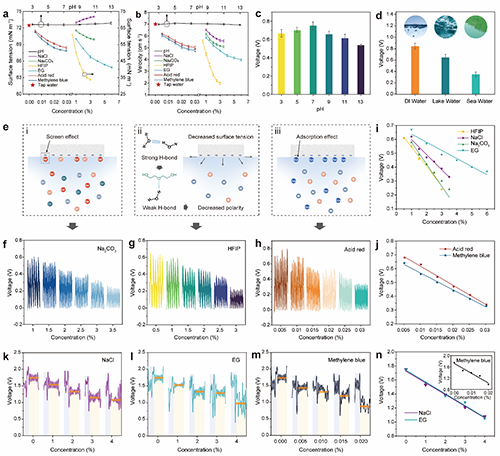
图4. 水上机器人实现水质自主检测
基于对连续运动固-液接触起电机制的研究与理解,针对传统水体环境检测技术依赖于昂贵设备、采样/测试过程耗时耗能的不足,作者提出水上机器人自主利用环境能量并主动感知水体信息的策略(图4)。其检测机理在于不同杂质种类/浓度的水体具有不同的表面张力和电荷量,影响机器人的行进速度,形成差异化的输出电压。在间歇运动中,水中无机盐、有机小分子、染料分别产生屏蔽效应、极性降低或吸附效应,减小水中的电荷转移和机器人的电压输出。在连续运动中,水体中的杂质通过屏蔽效应抑制气凝胶底部与水的电荷转移,从而减少机器人速度突变时的电荷迁移量和信号变化。通过建立杂质浓度与电学输出间的量化关系,机器人实现了多种水体污染物(包括无机物和有机物)浓度的自主检测,灵敏度高达99.6%,显示出其在水生环境监测中的应用潜力。
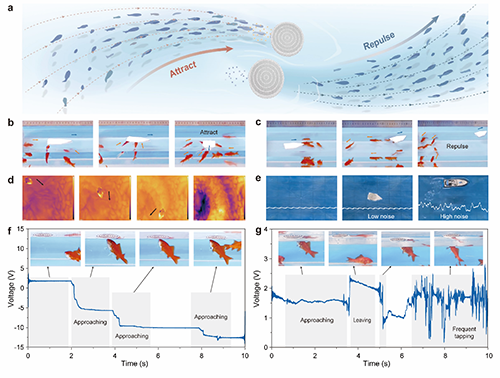
图5. 热/声伪装水上机器人感知水生物运动状态
这类水上机器人具有热/声隐身能力,结合其对水体信息的自主电学感知能力,可实现与水生物的友好互动/状态监测(图5),例如通过在燃料泵中负载友好/非友好诱饵实现对鱼群的控制,如吸引、排斥。此外,基于鱼群会影响机器人与水界面间的电荷转移,水上机器人可通过电信号变化同步感知鱼群状态信息(接触、靠近、远离)。利用这一策略有望提升对生物信息的动态监测能力,促进水生物的智慧管理和智能水生生态系统的可持续发展。
总结与展望
本文证实了一种集“自主推进-电能采集-环境感知”于一体的纤维素气凝胶水上机器人。该机器人通过配置Marangoni燃料泵实现水面上的连续推进,并利用其水面可控推进和并行电极阵列设计,进行固-液界面连续摩擦电信号的采集,实现了水体中无机盐、有机小分子、染料、pH值、鱼类运动等信息的自主检测。同时,作者揭示了一种普适性连续滑行固-液生电传感机制,为实现水生机器人自主利用环境能量进行多方面信息获取/环境交互提供了一种有益途径。这种连续滑行固-液生电传感机制也有望服务于其它水上运动载体或运动控制技术,用于不同水体环境的化学与生物信息监测,有望为推进智能水生生态系统构建和提升人-机-环境交互应用提供启发。
论文信息:J Zhang, M Wu, X Zhou, Z Ming, J Chen, L Zhu, J Yu*, ZL Wang*, J Xiong*, Self-propelled nanocellulose aerogel eco-robots for self-powered aquatic environment perception, ACS Energy Letters, 2024, 9, 4852-4863.
全文链接:https://pubs.acs.org/doi/10.1021/acsenergylett.4c01769
课题组主页:https://www.x-mol.com/groups/xiong_jiaqing
