随着电子技术和人工智能的发展,柔性传感器在电子皮肤、可穿戴设备、软机器人等多种应用中引起了越来越多的兴趣。目前,已报道的柔性传感器大多是通过将刚性导电材料分散到弹性体基体里或涂覆在柔性弹性体表面上制备而成的。然而,由于刚性导电材料与柔性弹性体基体之间的模量差异,容易引起导电网络断裂和滑动等损伤,导致柔性传感器的稳定性降低。此外,磁驱动具有非接触性、穿透性、远程控制等优点,使得基于磁驱动的软机器人受到越来越多的关注。相比于传统的由磁性颗粒直接分散在弹性体基体中制成的复合材料,磁流变液中磁性颗粒在磁场下的运动不容易受到限制,表现出很高的磁流变效应。目前基于磁流变液的软复合材料普遍缺乏传感能力,而传感对于提供环境信息和实现精确控制非常重要。
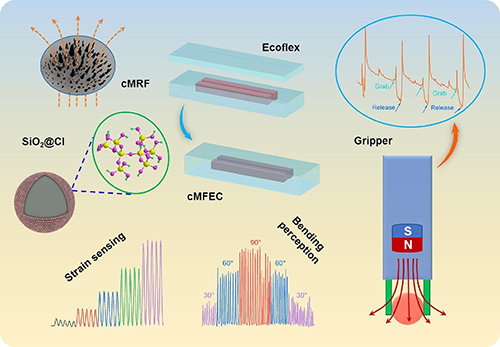
图1.摘要图
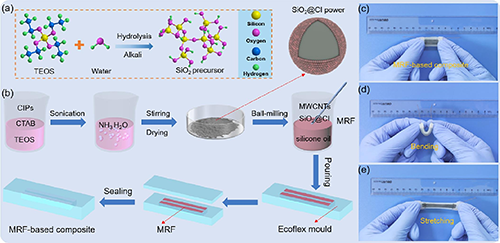
图2.导电磁流变液填充软弹性复合材料(cMFEC)的制备过程和实物图


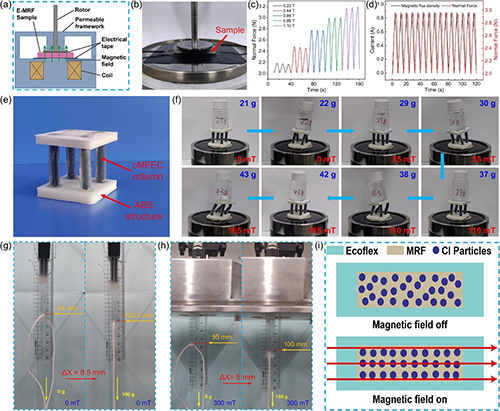
图5. 复合材料cMFEC的磁可调节刚度

图6.复合材料cMFEC的磁致动行为

结合复合材料cMFEC的传感能力和磁驱动行为,设计了智能磁致动夹持器的实时监测系统(图7a)。通过多次抓取、转移和释放实验,总结了cMFEC在相应动作过程中的传感信号变化规律。开始时,cMFEC夹爪处于自然状态,传感信号保持稳定。在移动磁铁控制夹持器抓住物体的瞬间,由于磁场和弯曲变形的作用,传感信号急剧增加。在转移物体的过程中,传感信号逐渐减弱。在释放物体的瞬间,传感信号再次迅速增大,随后逐渐回落到接近初始值(图7c)。传感信号具有一定的稳定性,可以通过实时观察cMFEC传感信号的变化来监测智能夹持器的抓取、转移和释放动作。
原文链接:
Yuxi Sun, Min Sang, Yunqi Xu, Zhentao Zhang, Shilong Duan, Yu Wang, and Xinglong Gong, Conductive Magnetorheological Fluid (cMRF)-Based Flexible Sensor with Adjustable Stiffness for Magneto-Mechanical Dual-Response and Soft Actuator, Chemical Engineering Journal, 2024, 489: 151229. DOI: 10.1016/j.cej.2024.151229.
https://doi.org/10.1016/j.cej.2024.151229
- 西安交大邵金友、田洪淼团队《Sci. Adv.》:开发出传感触发变刚度智能粘附结构 2023-03-25
- 中国科大人形机器人研究院 AM:挤-拉打印实现高界面韧性柔性传感器的一体化集成制造 2026-07-12
- 郑州大学申长雨、刘春太团队 AFM:多模态柔性传感器实现触觉与生物电感知集成 - 推动人机交互新发展 2026-04-24
- 南京林业大学杨蕊副教授 Carbohyd. Polym.:木基高强度粘附性导电水凝胶用于柔性传感器 2025-09-28
- 中国科大龚兴龙教授团队《Compos. Part B》:具有热致形状记忆和局部磁编程特性的多刺激响应软致动器 2025-08-29
- 华南师大张振 JCIS:以聚多巴胺包覆纤维素纳米晶和MXene为光热纳米增强填料的液晶弹性体基光致软致动器 2025-05-12
- 哈工大刘宇艳教授团队《Mater. Horiz.》:在较窄的响应温度区间内呈现优异的可逆驱动特性的双向形状记忆聚合物 2023-04-23
