人体内的骨骼肌自主收缩,为人们的日常生活提供了多样化的运动模式。大多数的骨骼肌是成对出现的,并组装成拮抗肌肉对,如手臂上的二头肌和三头肌。研究人员一直致力于研发出能够媲美天然肌肉的人工肌肉,以复制与骨骼肌相似的功能。目前已经开发了多种材料和类型的人工肌肉,包括气动/液压驱动器,介电弹性体,液晶弹性体,水凝胶和形状记忆聚合物材料等。其中形状记忆聚合物材料能够通过形状编程而在暂时形状和永久形状之间实现形状转换,因而受到极大的关注。骨骼肌只能自发收缩,其伸长需要外力,例如拮抗肌产生的收缩力。在身体手臂的运动中,当前臂上举时,二头肌作为主动肌收缩,三头肌作为拮抗肌需要放松。拮抗肌的放松意味着模量的降低,从而减少主动肌收缩时消耗额外的能量。然而传统形状记忆聚合物在形状变成和形状回复两种状态下的模量很接近,因此无法实现类似拮抗肌肉的运动。
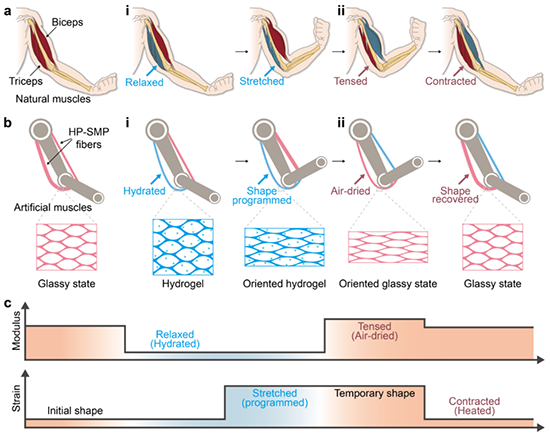
图1. 拮抗HP-SMP纤维对的仿生设计
近日,武汉大学常春雨教授课题组从人体手臂肌肉的拮抗运动获得了灵感,提出了一种简单而有效的策略用于可水合编程实现拮抗运动的形状记忆人工肌肉对,这种肌肉对无需外力的参与即可实现大驱动行程的可逆运动。水合编程形状记忆纤维(HP-SMP fiber)通过在溶胀状态下牵伸干燥得到暂时形状,而在加热后可以实现纤维的收缩即永久形状的恢复。如图1所示将水合纤维组装成拮抗肌肉对,拮抗肌在水合后,通过主动肌的收缩可以带动整个手臂的运动;而主动肌的拉伸是通过拮抗肌的收缩实现的,因此实现了形状记忆材料的可逆运动。这项工作代表了在仿生设施中使用SMP开发可逆、连续机器人系统的重要一步。
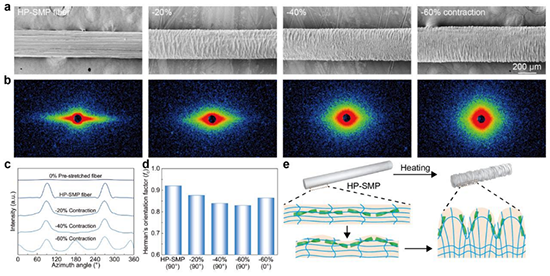
图2. HP-SMP纤维收缩过程的表征

图3. HP-SMP纤维的应变和应力控制形状编程对驱动行为的影响

图4. HP-SMP纤维的拮抗作用
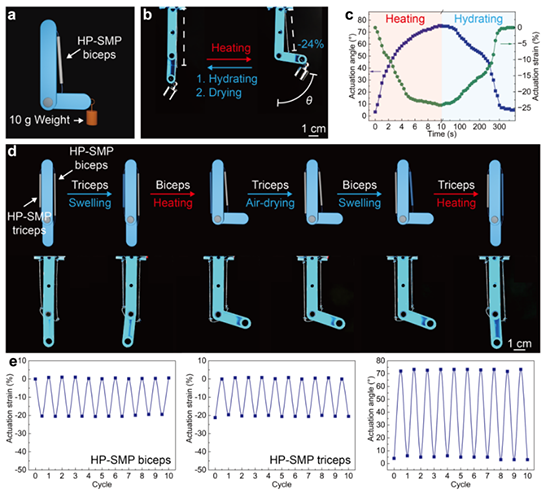
图5. HP-SMP纤维人工手臂
简而言之,该研究采用了水合可编程形状记忆纤维来模拟骨骼肌的可逆拮抗运动。利用HP-SMP纤维水合状态和驱动状态之间较大的模量差距,可以通过水化编程和热驱动实现人工手臂的可控运动。这项工作为使用形状记忆聚合物作为人造肌肉的软机器人和仿生机器的发展铺平了新的道路。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202401005
课题组网页:https://www.x-mol.com/groups/Chang_cy
- 东华大学张青红教授等 AFM:基于高强导电同轴MXene纤维的多响应人工肌肉 2026-06-15
- 华南理工刘伟峰、广东工大邱学青 AFM:木质素构筑动态液晶双网络 - 打造高性能光热驱动人工肌肉 2026-03-27
- 武汉纺大夏治刚/南开刘遵峰/中国药大周湘 Matter:扭转自振荡人工肌肉 2026-02-08
- 哈工大刘宇艳教授/张东杰副教授团队 AFM:基于相分离双网络聚合物实现形状恢复起始温度的可编程调控 2026-01-12
- UCLA 金丽华教授团队 AFM:通过非平衡过程实现形状记忆聚合物可编程多模态形状演化 2025-12-23
- 东北农大张海洋团队 Small:受章鱼启发的刚度可调的智能粘附剂 - 用于空气及水下不平整表面的粘附 2025-09-02
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
