刺激-响应变形材料能够在外部刺激下发生可逆变形,因此被广泛用作软体机器人系统中的驱动器。从策略层面上讲,软体机器人的功能主要取决于其驱动器件(模块)行为的复杂性。因此,具有不同驱动方式的各种刺激-响应变形材料,如形状记忆聚合物、液晶弹性体、介电弹性体和水凝胶是在过去的几十年中得到了很好的发展。在诸多材料中,可逆形状记忆聚合物(r-SMP)作为热门的智能软体材料,在材料特性和驱动方式方面表现出色,也具有更好的可编程性。在现阶段驱动器的设计制造过程中,多层结构/多层策略是一种常用的手段。从机理上讲,多层策略只需要驱动器各层在外部的刺激下利用自身固有特性(例如利用不同层间的热膨胀系数差异)引起层间尺寸变化差异即可产生驱动行为,而可以忽略分子层面上的设计。但是,其驱动模式往往仅限于简单的可逆弯曲,并且在制造定型后不能够进行随意编辑。因此,从功能的角度来看,需要一种简单而有效的方法来使多层驱动器的驱动模式多样化、可编程化。此外,水凝胶也是一种非常重要的软体变形材料。在以往的一些工作中,基于水凝胶的驱动器也已经可以实现各种动作(例如弯曲、抓握、提升和行走)。然而,由于水凝胶的低模量和耗时的溶胀/消溶胀过程使得它们普遍比较脆弱,并且变形过程相对缓慢。
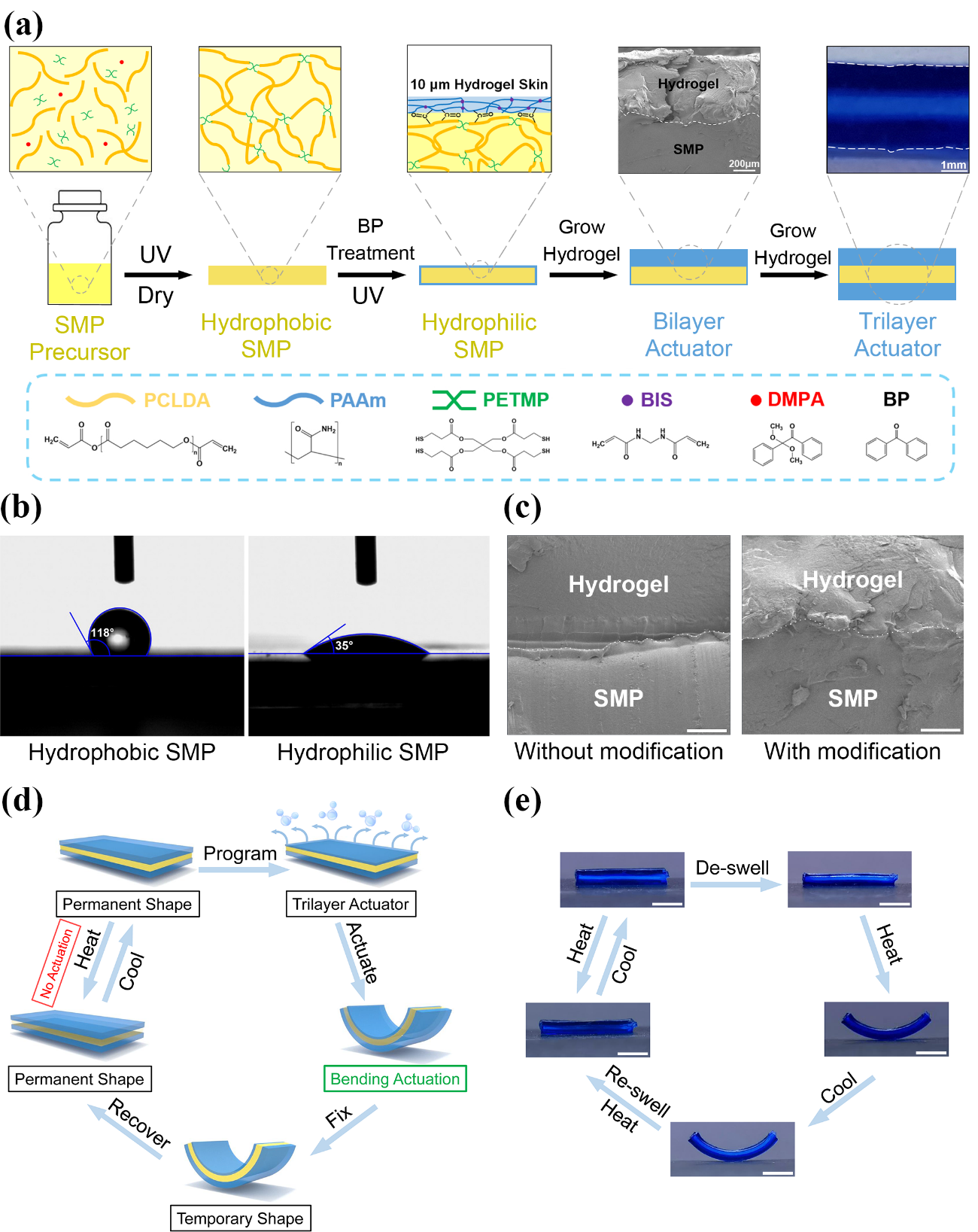
图1. SMP-水凝胶驱动器的设计制备过程及原理

图2. SMP-水凝胶驱动器的可任意和重复编辑特性

图3. SMP-水凝胶驱动器的防火性能及其在火场救援场景的应用
通讯作者简介
江赛华,华南理工大学机械与汽车工程学院,2014年博士毕业于中国科学技术大学火灾科学国家重点实验室,同年获得香港城市大学联合培养博士学位,曾在2017-2020年间于宾夕法尼亚大学从事博士后研究工作。在软体驱动、智能传感、绿色阻燃等方面从事了多年研究工作。近年来主持国家自然科学基金(2项)、广东省自然科学基金(3项)、科技部国家重点研发计划项目专题(1项)、广州市人才项目“珠江科技新星”、国家重点实验室开放基金等国家/省部级科研项目十余项,多次以主要研究骨干身份参与“973”项目与国家重点研发计划项目。目前共发表SCI收录学术论文92篇,其中以第一或通讯作者身份在Nano Energy, Chemical Engineering Journal, Journal of Materials Chemistry A, ACS Applied Materials &Interfaces, Journal of Colloid and Interface Science, Composites Part B:Engineering 等国际期刊发表论文46篇,研究论文获得同行积极评价(引用数累计超过3347次,h-index为32,i10-index为67。申请国家发明专利27项,授权10项,登记软著1项。
原文链接:https://doi.org/10.1016/j.cej.2022.139054
- 坦佩雷大学郭洪爽博士 Adv. Mater.: 无需引发剂 - 卤键液晶弹性体打造光驱动柔性驱动器 2025-05-31
- 北大刘珂团队与合作者 Adv. Mater.:可用于深水驱动的仿生人工肌肉 2024-05-03
- 浙大赵朋/张承谦课题组 Addit. Manuf.:磁场辅助增材制造柔性驱动器 2024-02-06
- 南京大学王瑜/陆延青团队 Matter:可重写和可重编程的全蛋白质基多功能光学成像平台 2024-02-23
- 南工大材料学院《Compos. Part A》:具有机械稳健性能的超疏水型多层被动降温复合材料 2023-12-07
- 武汉大学张先正教授团队《Adv. Mater.》:基于梯度水凝胶的体外肠道菌群模型用于指导药物剂型的优化 2023-04-11
- 中山大学吴嘉宁课题组《Cell Rep. Phys. Sci.》:扇形管虫的膜鞘是一种高效能量吸收器和稳定器 2023-01-27
