动物肌肉是自然界中最高效的柔性驱动器,对于人工肌肉的发展起到了重要的启发作用。在众多人造智能材料中,液晶弹性体(LCE)具有与天然肌肉相似的可逆线性驱动应变能力。最近的研究表明,当LCE制成纤维时,其较大的比表面积使其能够实现与天然肌肉类似的超快速驱动。然而,单根纤维无法为实际应用提供足够的力量,多根纤维合并使用时驱动速度会因为比表面积的减小而降低。因此,人工肌肉目前还未能以实际应用的尺寸实现与动物肌肉相当的快速线性驱动。此外大多数基于智能材料(包括LCE)的人工肌肉的环境适应性有限,主要应用场景都局限于空气环境中,难以像水生动物的肌肉一样支持软体机器人的水下运动。即便已有基于介电弹性体的人工肌肉实现了深海驱动,但其线性变形有限,并且受到破坏时会快速失效,工作鲁棒性不足。


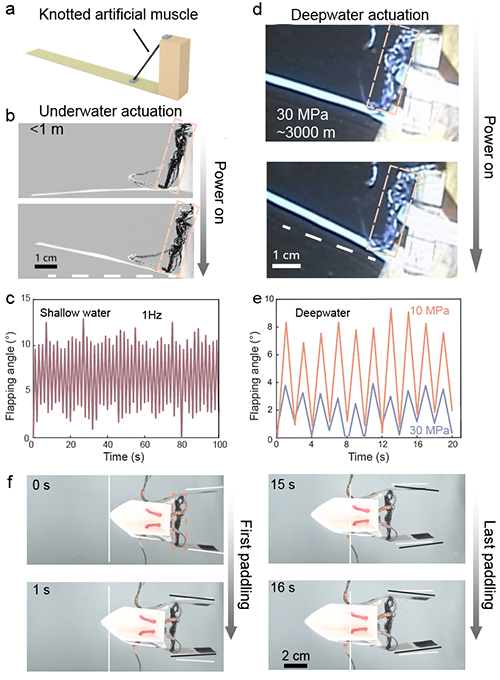
图4. 平结人工肌肉在浅/深水环境中的应用。(a)人工肌肉驱动的桨的示意图;(b)绳结人工肌肉驱动的桨在浅水下的运动情况;(c)绳结人工肌肉驱动的桨在浅水下以1hz的频率驱动的拍动情况;(d)绳结人工肌肉驱动的桨在3000m水下的运动情况;(e)绳结人工肌肉驱动的桨在3000m水下以1hz的频率驱动的拍动情况;(f)用绳结人工肌肉驱动小船的过程。
这项工作为人工肌肉提供了一种新的结构设计原则,解决了人工肌肉驱动速度不足,适应性与鲁棒性有限的问题。并且,这些仿生绳结人工肌肉有望实现更大规模的生产与更广泛的应用场景拓展,为虚拟现实体验、微创手术、水质监测和深海探索等应用领域提供了创新的解决方案。相关研究在《Advanced Materials》发表题为“Knotted Artificial Muscles for Bio-mimetic Actuation under Deepwater”的研究论文。北京大学博士生陈雯慧为第一作者,北京大学刘珂研究员,中科院沈阳自动化所王聪副研究员与北京大学杨槐教授为共同通讯作者。本工作获得了国家重点研发计划“智能机器人”专项的支持。
文章链接:https://doi.org/10.1002/adma.202400763
- 东华大学张青红教授等 AFM:基于高强导电同轴MXene纤维的多响应人工肌肉 2026-06-15
- 华南理工刘伟峰、广东工大邱学青 AFM:木质素构筑动态液晶双网络 - 打造高性能光热驱动人工肌肉 2026-03-27
- 武汉纺大夏治刚/南开刘遵峰/中国药大周湘 Matter:扭转自振荡人工肌肉 2026-02-08
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 东华大学丁彬/李召岭 AFM:液晶纺丝制备高强韧纤维素离子凝胶纤维 2026-07-01
- 北化曹鹏飞教授、田明教授 Adv. Mater.:疏溶剂弹性体涂层“筛分”离子构筑双层SEI助力低温电池超稳循环 2026-07-04
