武汉大学薛龙建课题组《ACS AMI》:壁虎启发的用于曲面可控黏附的仿生表面
2022-07-01 来源:高分子科技
自然界中,壁虎可以在垂直墙壁、天花板等不同表面快速爬行,表现出全方位的运动能力。这种优异的运动能力与壁虎脚趾上精细的微纳米刚毛结构以及脚趾的运动模式密切相关:壁虎每个脚趾上的刚毛都朝着脚趾末端的方向倾斜;当壁虎的脚趾下压并向内收紧时,刚毛的抹刀型末端顺着收紧方向在接触表面排列,形成大量有效接触点,从而产生足够大的黏附力。当脚趾向上翻时,抹刀型末端从接触表面剥离,使得壁虎脚可以轻易地从接触表面快速脱离(图1)。
受壁虎刚毛结构的启发,设计制备出的仿生可逆黏附垫在工业生产、生物医疗、智能机器人以及航空航天等领域具有巨大的应用前景。然而,仿生可逆黏附很多是在平面上实现的,在具有宽曲率范围的球面上实现强黏附和可控脱附仍具有很大的挑战。

近期,受壁虎取向抹刀状刚毛和脚趾协同运动的启发,武汉大学动力与机械学院、工业科学研究院薛龙建课题组(NISE-Lab) 采用溶剂驱动墨印法一步制备了具有径向取向的抹刀形末端微柱阵列(PROST)(图2)。PROST在向上拉的过程中,径向取向的末端向中心方向剪切,类似于壁虎脚趾的黏附动作,在平面和曲面(曲率高达100 m-1)上均表现出优异的黏附性能(图3);在曲率为63 m-1的球面上,其黏附力甚至达到T型微米柱阵列的2倍,是单向取向抹刀形柱状阵列的3.7倍(图4)。在溶剂刺激下,类似于壁虎脚趾的上翻动作,PROST的四个角向上卷曲,抹刀末端从基底表面剥离,实现快速分离。因此,PROST可用于在空气中或水下转移具有广泛曲率的物体(图5)。该工作为适用于曲面的黏附材料设计提供了新的设计原理和制造技术。
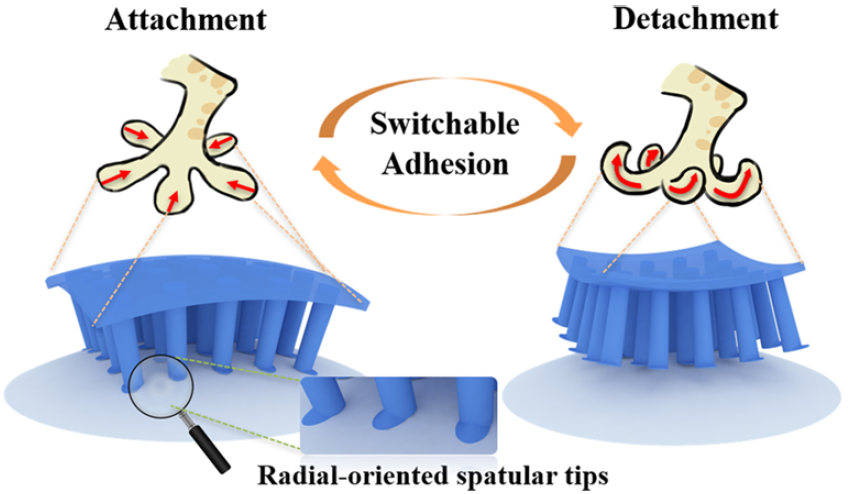
图1 壁虎脚趾的黏附和脱离示意图

图2 PROST的制备过程示意图

图3 有限元模拟揭示PROST具有优异曲面黏附性能的机制

图4 PROST在不同曲率表面上的黏附性能以及黏附性与基底厚度的关系

图5 PROST在曲面上黏附-脱离快速切换特性以及在空气或水下对曲面物体的转运
原文链接:https://pubs.acs.org/doi/10.1021/acsami.2c07909
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 武汉大学薛龙建课题组《Small》:受壁虎刚毛和树蛙脚掌启发的仿生表面,实现黏附力和摩擦力的同步提升 2021-01-04
- 武汉大学薛龙建课题组《Small》:模仿爬山虎和壁虎,成功实现在不同粗糙表面的光控可逆黏附 2019-11-20
- 中科院深圳先进院吴天准研究员团队研发出超疏水超疏油的高性能仿壁虎干胶 2019-04-04
