清华大学危岩教授、吉岩副教授团队《Sci. Adv.》:具有可重编程伸缩衍生运动的磁响应液晶弹性体软体驱动器
2022-06-25 来源:高分子科技
磁响应软体驱动器具有可非接触调控、响应快速等优点,在生物医学设备、软体机器人和航空航天等领域展现出巨大的应用潜力。由于磁场穿透力极强,磁控驱动器能够在密闭或受限空间(例如,人体和密封装置)中应用,这也是磁响应驱动器与其他刺激响应系统(例如热刺激、光刺激等)相比最显著的优势之一。其中,具有可重编程功能的磁控软体驱动器,因其能够在不断变化的条件下进行工作或执行多重任务,而受到特别的关注。对于可重编程的磁控软体驱动器,目前有两个重要问题亟待解决:(1)形变(运动)模式局限(仅有可逆弯曲和扭转这一类基本运动模式),(2)难以实现局部和序列磁控。
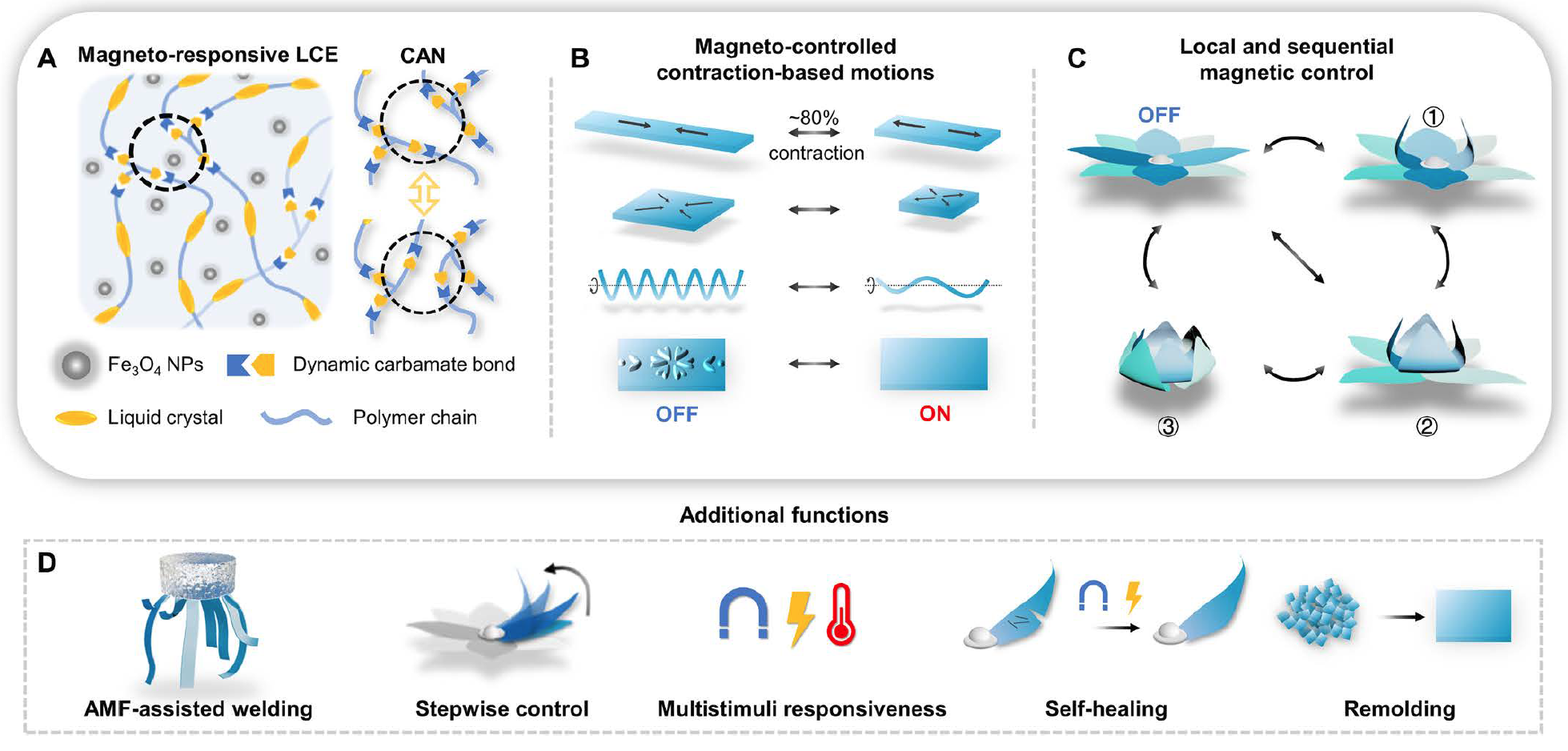
图1. 设计制备具有可重编程伸缩运动且局部可控的多功能磁响应软体驱动器
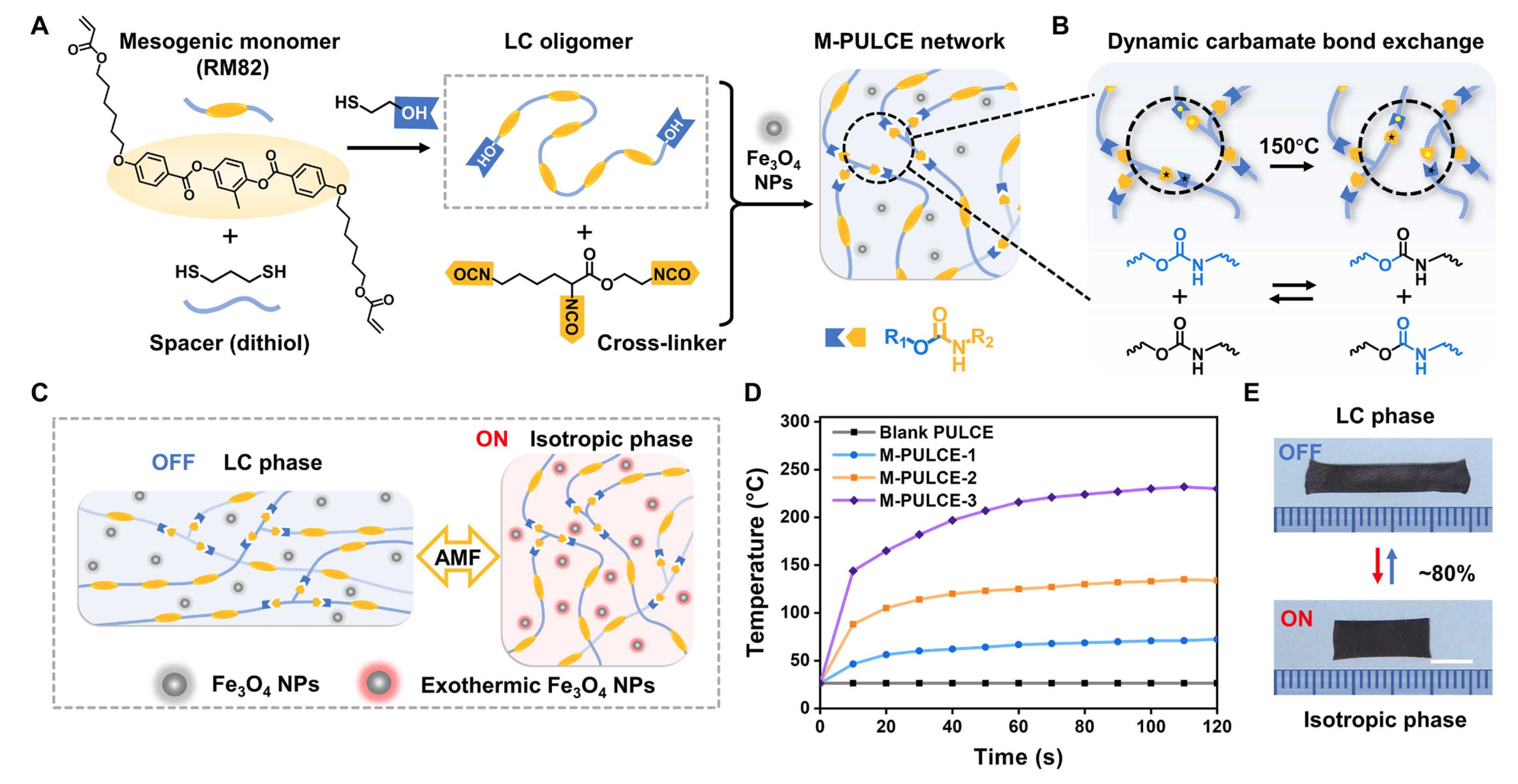
图2 M-PULCE驱动器的设计与制备

图3 多种磁控运动模式
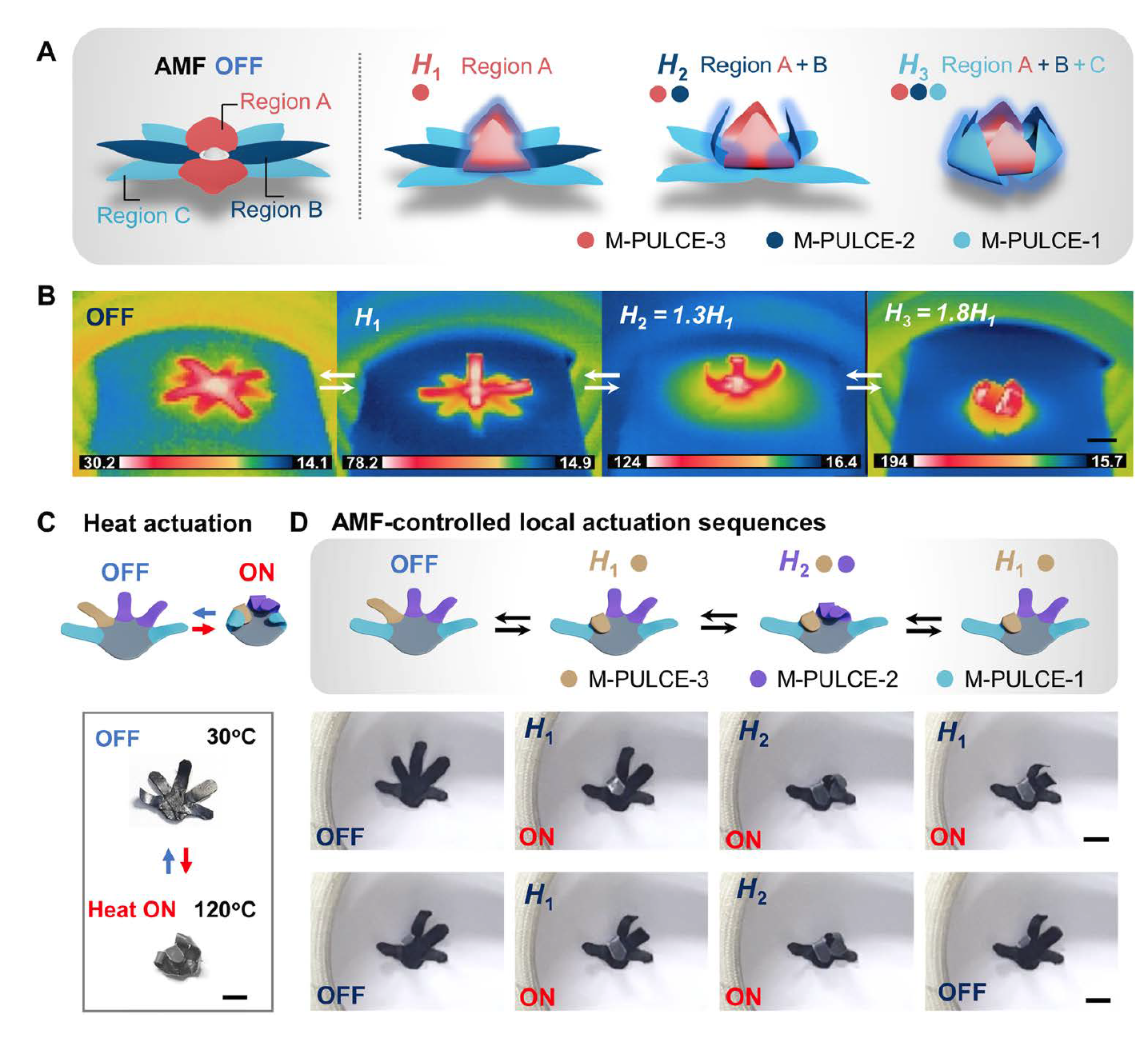
图4 组装后M-PULCE的局部和序列磁控运动

图5 磁场辅助“焊接”实现异质多材料三维动态结构制备
该文章以“Locally controllable magnetic soft actuators with reprogrammable contraction-derived motions”为题发表在Science Advances上。清华大学化学系博士生仵雅禾和张帅为论文的共同第一作者。通讯作者为清华大学化学系危岩教授和吉岩副教授。
原文链接:https://www.science.org/doi/10.1126/sciadv.abo6021
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 天津大学封伟教授团队 Angew: 胆甾液晶弹性体变色光子材料前沿进展 2026-06-22
- 江苏大学张侃教授团队 AFM:基于动态共价键聚苯并噁嗪网络构筑高强、可重塑且可化学回收的生物基热固性材料 2026-04-08
- 江苏大学张侃教授团队 Angew:基于双重动态共价键构筑可回收、耐高温且本征阻燃型生物基聚苯并噁嗪类玻璃体 2026-02-25
- 中山大学张泽平/阮文红/容敏智/章明秋 AM:动态共价键辅助3D打印一体化多孔阴极/复合聚合物电解质-实现超长寿命固态锂金属电池 2025-08-01
