近期,河南科技大学陆昶教授团队在柔性可伸缩电子皮肤方面取得新进展。通过在柔性天然橡胶基底表面构建石墨烯竖直阵列,制得与人体皮肤类似的多功能感知能力的柔性电子皮肤。相关成果以标题为“Stretchable Vertical Graphene Arrays for Electronic Skin with Multifunctional Sensing Capabilities”发表在Chemical Engineering Journal上.

图1竖直石墨烯阵列的形态结构及其形成机理
本文将天然胶乳薄膜直接浸泡于石墨烯/环己烷分散液中,环己烷在溶胀天然胶乳薄膜的同时,驱使石墨烯附着在薄膜表面。环己烷在挥发过程中,导致薄膜表面收缩。该过程一方面使得附着在薄膜表面的石墨烯相互挤压,使得石墨烯片只能部分粘附在薄膜表面。另一方面,天然胶乳薄膜是通过乳胶粒聚集形成,环己烷在溶胀薄膜过程中,会破坏乳胶粒子之间的界面,使得薄膜表面收缩过程中,乳胶颗粒之间形成间隙(图1a)。石墨烯片附着在薄膜的部分随着乳胶颗粒的变形而变形,使其被镶嵌在乳胶颗粒的空隙中,而石墨烯片未附着的部分则随着薄膜的收缩翘曲,形成了竖直阵列(图1b-d)。将表面双轴方向拉伸不同长度后,可观察到竖直阵列是由石墨烯部分翘起形成(图1e-f)。
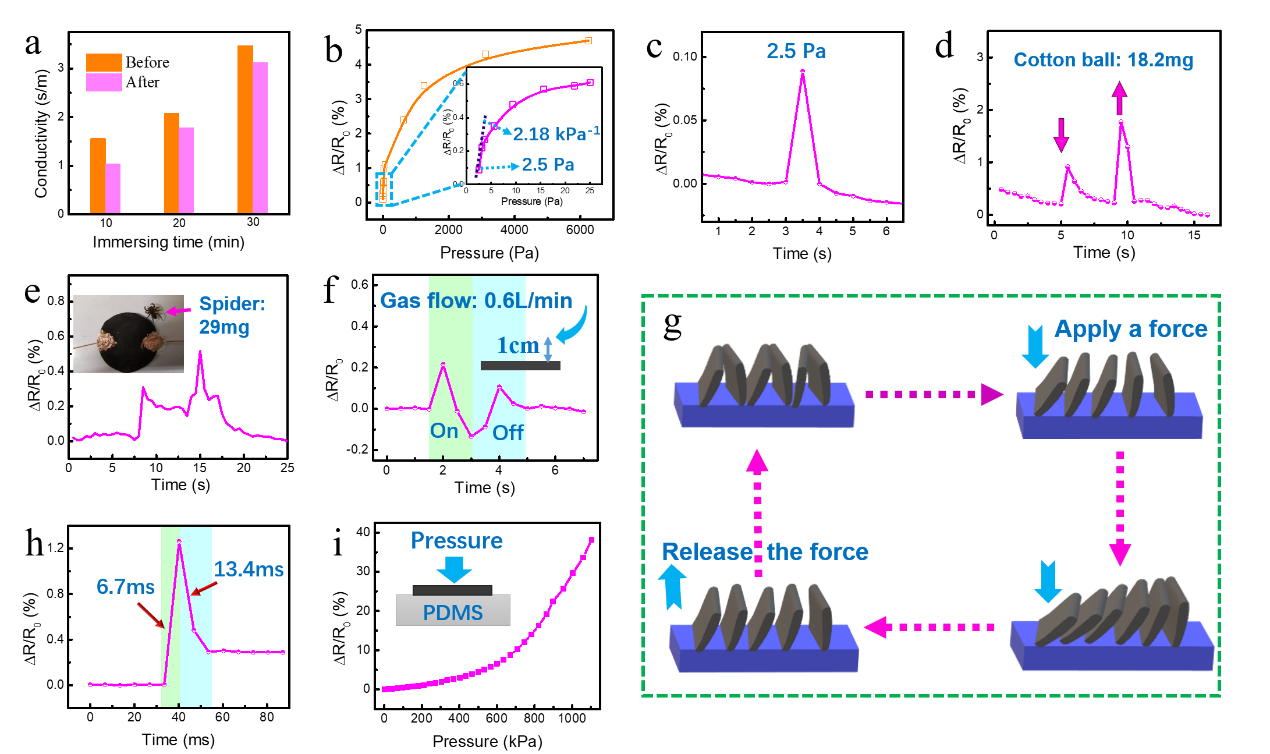
图2 电子皮肤对压力、气流的响应行为
电子皮肤对低至2.5Pa的压力即可产生响应,可检测到蜘蛛在其表面爬行时的响应信号(图2b-e);且其只对压力和气流的施加或移除过程产生的响应,该响应特性是由于竖直石墨烯阵列的形貌特征决定的(图2f-g)。同时,电子皮肤还具有响应时间(6.7ms)及恢复时间(13.4ms)快、压力检测范围宽(2.5kPa~1.1 MPa)的特性(图2h-i)。

图3 电子皮肤对不同表面粗糙度物体的感知特性及其应用
对于纤维状、颗粒状及鳞片状物体,如不同的纸张、不同目数的砂纸、头发,电子皮肤分别能感知其表面粗糙度的变化(图3a-c)。且电子皮肤在物体表面滑动产生的响应信号具有响应快、恢复慢的特性。利用该特性,可以识别毛笔在其表面的滑动方向(图3d-h)。
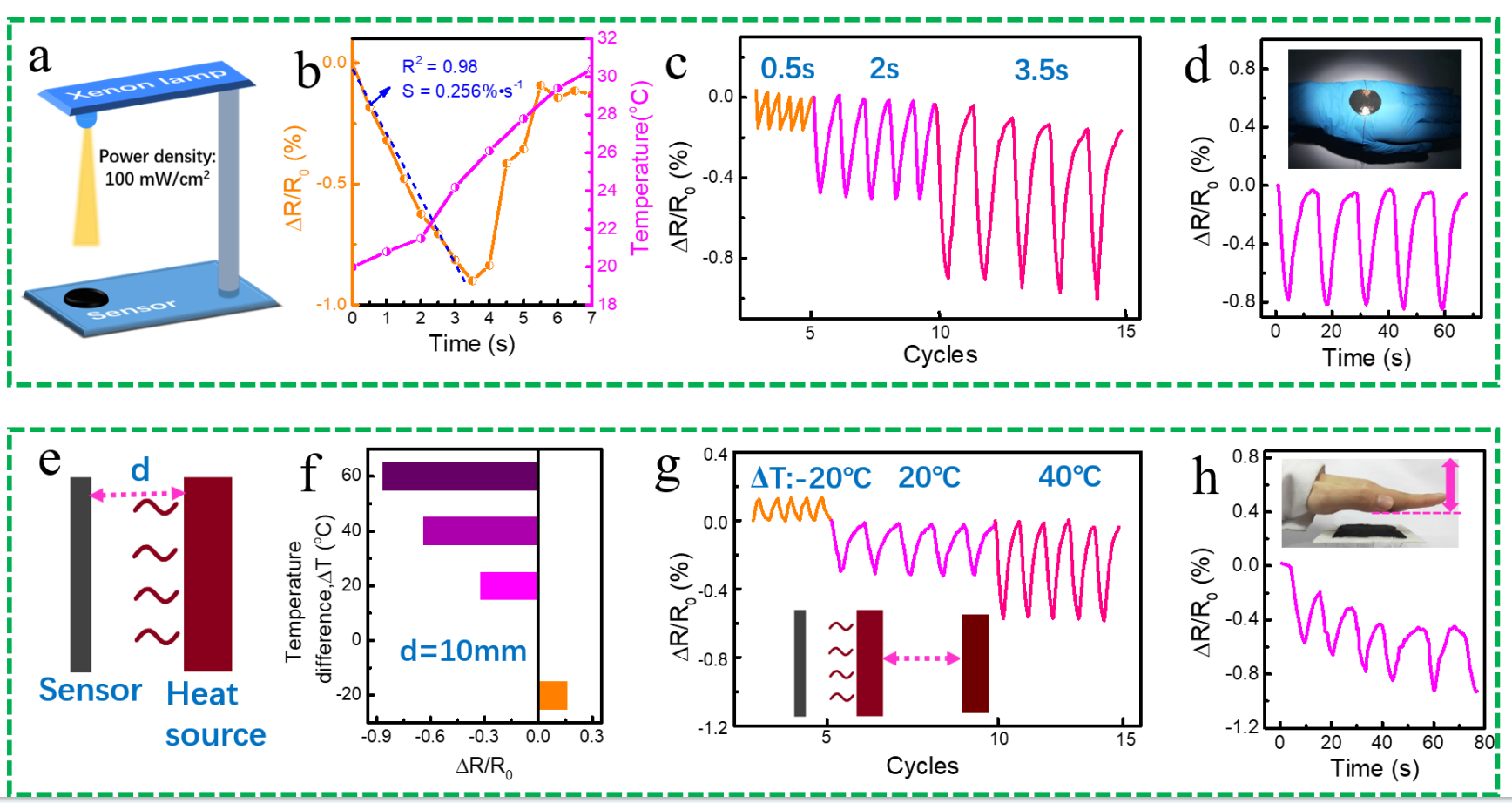
图4 电子皮肤对光和热的感知特性
利用石墨烯对热的负温度效应,使得电子皮肤可用于感知光照和温差。对于光照,电子皮肤具有响应时间短、敏感性高的特性。在一个太阳光强下,0.5s的光照时间就可使电子皮肤电阻产生变化(图4a-d)。电子皮肤能对距离其30mm,且与其温差为±20 °C的物体产生响应(图4e-g)。电子皮肤对温差的高灵敏感知特性,使其可通过非接触的方式感知手掌的接近(图4h);即便带上丁腈手套,电子皮肤仍可感知到手掌的接近。
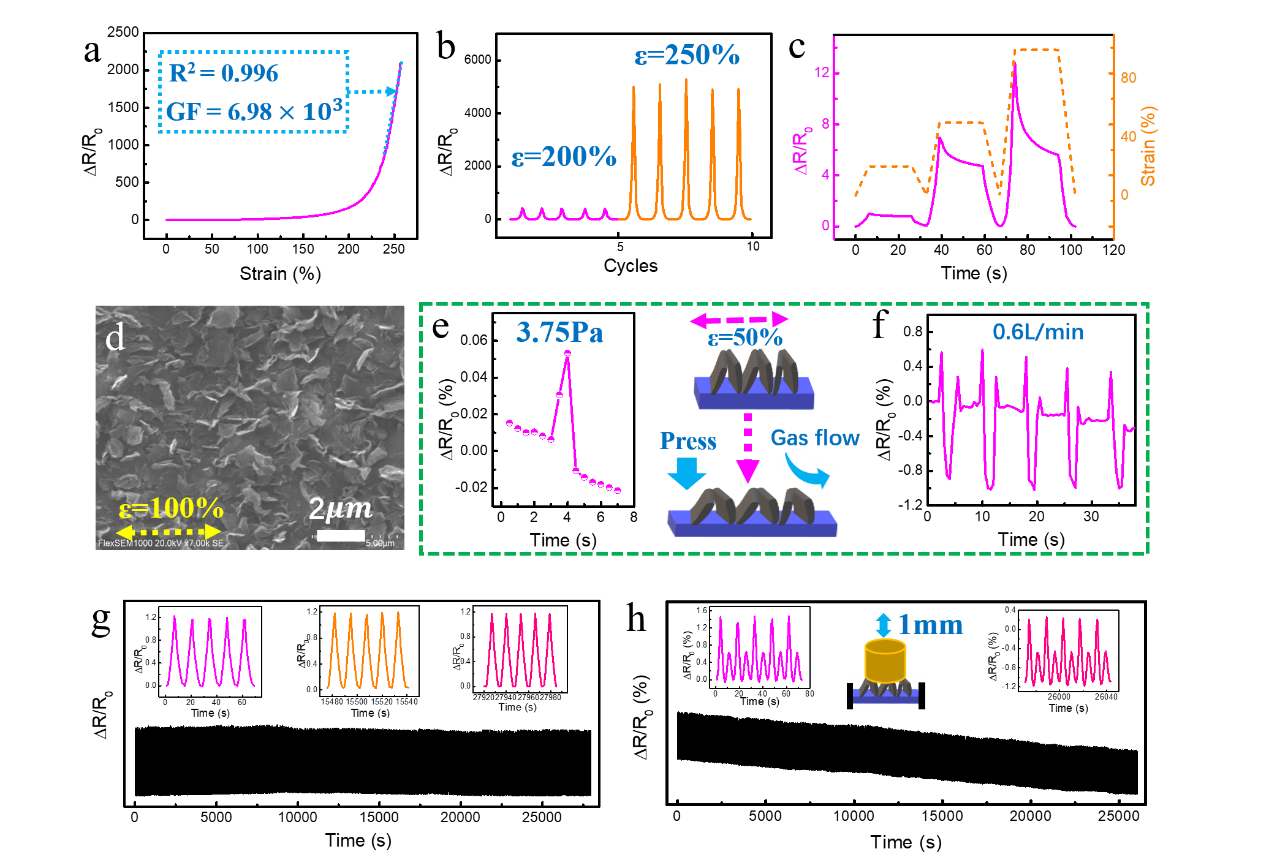
图5 电子皮肤对应变的感知特性
基于天然胶乳薄膜优异的可伸缩性,使得电子皮肤具有对应变的感知能力。其能感知到0.5%~250%的形变,且响应信号具有良好的稳定性(图5a-c)以及鲁棒性(图5g-h)。即使在100%的应变下,电子皮肤仍具备对压力和气流灵敏的感知能力(图5e)。
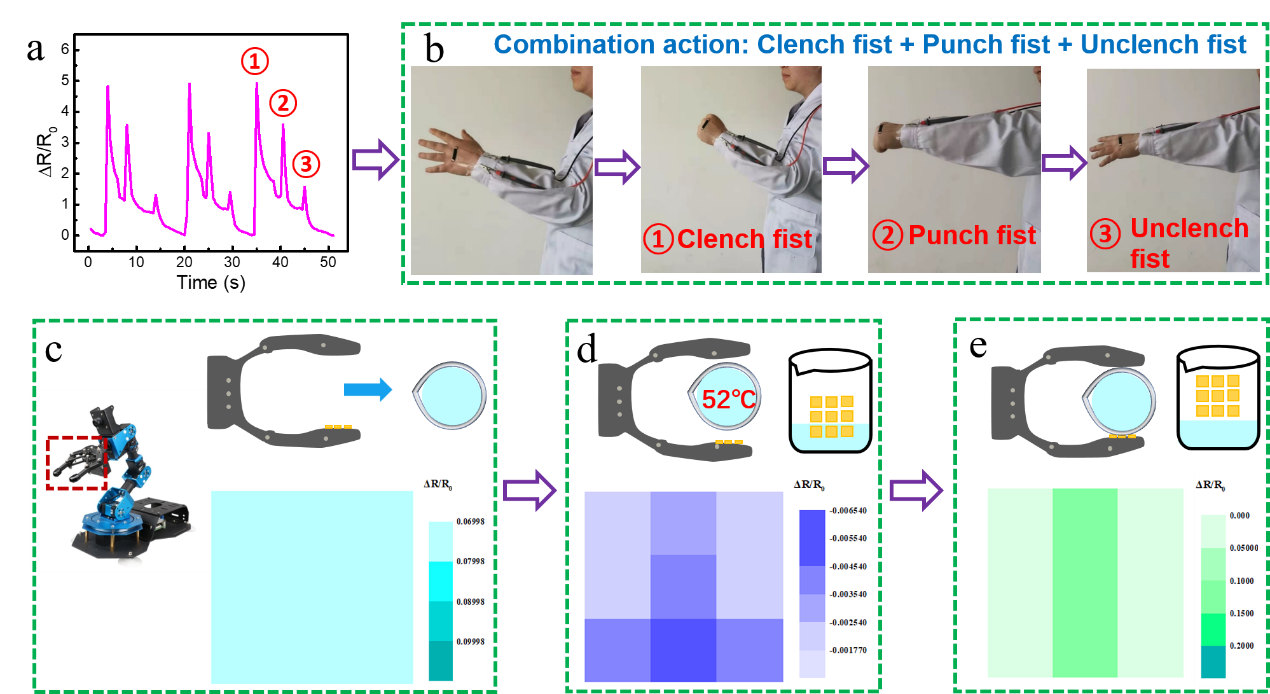
图6 电子皮肤用于实时监控人体及机械臂动作
基于电子皮肤的多功能感知能力,使其具备对人体组合动作的检测能力。例如,可用于检测人体握拳-挥拳-松拳的动作(图6a-b)。同时,电子皮肤构成的阵列附着在机械臂夹具,可用于监控夹具的移动、非接触感知物体与电子皮肤的温差以及抓握物体等动作。
姚大虎副教授、硕士研究生吴兰兰为论文共同第一作者,陆昶教授、高喜平副教授为论文共同通讯作者。河南科技大学为论文唯一署名单位。
原文链接:https://doi.org/10.1016/j.cej.2021.134038
- 武汉理工大学何大平、刘波/西湖大学黄嘉兴 Nat. Commun.:破解界面相互作用困境 - 实现日常织物保形石墨烯涂层宏量制备 2026-05-21
- 天津大学封伟团队 AFM:氧化石墨烯-熔盐复合材料突破高温光热相变储能瓶颈 2026-04-20
- 化学所刘国明、巴斯克大学Alejandro J. Muller、都灵理工大学Alberto Fina《Macromolecules》:石墨烯纳米纸中生物聚酯不同稳定性的晶体 2026-03-18
- 江南大学刘天西、董建成/韩国科学技术院Steve Park连发两篇 Adv. Mater.:在电子皮肤领域取得系列研究成果 2026-06-26
- 苏大张晓宏教授团队招聘博士后 - 人形机器人电子皮肤与多模态触觉感知方向 2026-06-17
- 浙江大学IBE团队蓝玲怡研究员 Nat. Commun.:仿生凝胶基电子皮肤压力传感器实现抓取过程中水果硬度的精准感知 2026-05-31
- 上海交通大学唐山团队 Angew:主链刚性功能化策略实现天然橡胶性能跃升 2026-06-12
