弹性软球体在极端压缩下的变形行为,即“压扁问题” (flattening problem),广泛存在于软体机器人、智能粘附、柔性传感、摩擦学超表面等多个工程与科学领域(图1)。在软体机器人、柔性电子与可穿戴设备中,材料压缩特性影响着传感器性能与交互反馈;而在智能界面设计中,软球的变形亦可用于调控摩擦和增强粘附力。上述应用都要求对弹性软球体在压缩下的接触力和接触半径等关键变量进行高效、准确的预测。传统的Hertz理论虽能刻画小变形下的弹性球体接触,但在大变形情况下明显失准。随着软材料相关技术的发展,亟需对极端压缩下的接触行为进行更为精确的研究与建模。
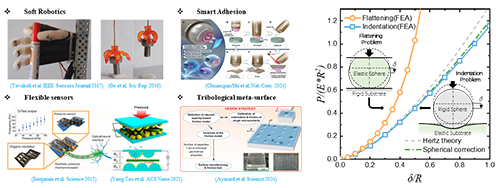
图1 压扁问题的应用背景(包括软体机器人、智能粘附、柔性传感、摩擦学超表面)及经典的小变形接触力学模型(Hertz Theory,灰色虚线)对接触力的预测偏差(黄色带圆点实线)。
近日,新加坡南洋理工大学校长讲席教授夏焜(K. Jimmy Hsia)、哈尔滨工业大学冷劲松院士、清华大学高华健院士团队通过理论建模、有限元仿真与实验系统探讨了弹性软球体在极端压缩条件下的接触力学,提出了适用于大变形压扁问题的解析模型,推导了接触力、接触半径和接触压力分布的简单表达式。研究还发现对于常见弹性软材料,材料非线性与接触条件对大变形压扁问题的影响可近似忽略。
相关研究以“Nonlinear Contact Mechanics of Soft Elastic Spheres Under Extreme Compression“为题发表在固体力学旗舰期刊Journal of the Mechanics and Physics of Solids上。
为了应对传统的Hertz接触理论的小变形、线弹性等理想假设在大压缩情形下不再成立的问题,研究提出了一个适用于大变形的有限变形接触理论框架,能够系统考虑两个关键因素:有限厚度效应(finite-thickness effect)和径向膨胀效应(radial expansion effect)。基于这一理论框架,研究推导出接触力、接触半径和接触压力的解析表达式。
研究团队对弹性软球体的接触力与接触半径进行了实验测试。实验结果表明,在压缩比高达80%的极端条件下,理论给出的显式表达式结果与实验结果高度一致,显示出优异的预测能力,如图2所示。
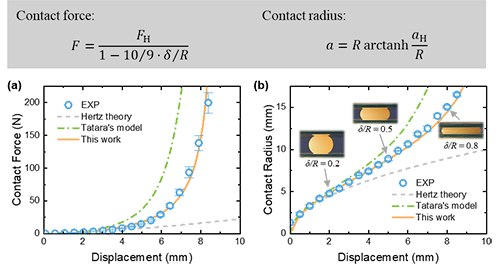
图2 接触力和接触半径解析表达式的实验验证。(a)本研究的解析表达式预测的接触力(橙色实线)与实验结果(蓝色圆形)的对比。(b)本研究的解析表达式预测的接触半径(橙色实线)与实验测量结果(蓝色圆形)的对比。图中还包括Hertz理论(灰色虚线)和Tatara模型(绿色点划线)以作对比。实验使用Ecoflex 00-30软球体样品。
大变形压扁接触问题中,材料非线性、接触条件、几何非线性三大效应是最可能导致传统小变形理论失效的主要原因。本研究研究还通过有限元分析揭示了压扁问题中,材料非线性和接触条件非线性仅具有次要的影响;揭示了几何非线性对球体大变形压扁问题的力学行为偏离Hertz理论的预测起到了决定性作用,结果如图3所示。
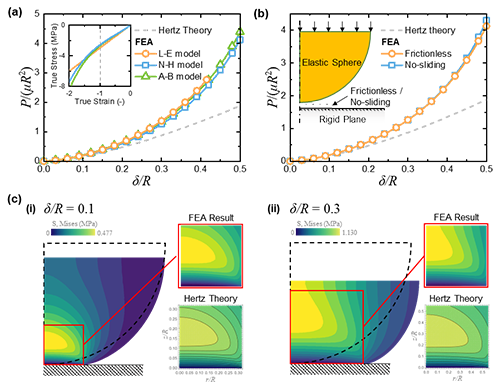
图3 压扁问题中非线性效应的分析。(a) 材料非线性对接触力的影响。灰色虚线表示Hertz理论的预测结果,而带有散点的曲线表示不同本构模型下的有限元分析结果(橙色圆形:线弹性(L-E)模型,蓝色方块:neo-Hookean(N-H)模型,绿色三角形:Arruda-Boyce(A-B)模型)。插图展示了各本构模型在单轴压缩下的应力-应变曲线。(b) 接触条件对接触力的影响。有限元分析结果分别给出了无摩擦(橙色圆形)和无滑移(蓝色方形)条件下的接触力,同时也展示了Hertz理论的预测(灰色虚线)。(c) 弹性球体在(i)小压缩比(δ/R = 0.1)和(ii)大压缩比(δ/R = 0.3)情况下的von Mises应力分布。放大图突出显示了接触区域附近的应力分布,并与Hertz理论的预测进行比较。对于相对较小的变形(如δ/R = 0.1),有限元分析结果与Hertz理论吻合良好。然而,对于相对较大的压缩变形(如δ/R = 0.3),有限元分析结果与Hertz理论之间存在显著偏差,表明几何非线性在压扁问题中对应力分布有显著影响。
本研究在理论、模拟与实验三个层面建立了一个完整的分析体系,为软弹性球体在极端变形下的接触力学提出了具通用性和解析形式的理论框架。这些成果不仅填补了Hertz理论在大压缩情形下的空白,也为软弹体器件、细胞操作平台、微型传感器等结构设计提供了新工具和设计准则。
哈尔滨工业大学博士生(新加坡南洋理工大学访问博士生)穆童为论文第一作者;新加坡南洋理工大学博士后研究员令狐昌鸿、校长讲席教授夏焜、哈尔滨工业大学冷劲松院士为论文共同通讯作者;其他作者包括上海交通大学博士生李若章、清华大学高华健院士。
原文链接:https://doi.org/10.1016/j.jmps.2025.106229
作者简介:

穆童
哈尔滨工业大学博士研究生(导师冷劲松院士),新加坡南洋理工大学访问博士生(导师夏焜教授)。主要从事智能材料力学行为与智能材料结构设计研究。研究工作包括形状记忆聚合物及其复合材料的热-力学行为建模、液晶弹性体复合材料结构设计、智能软材料接触力学及其应用等。拥有中国国家发明专利3项;发表专著章节1章;在 JMPS、Composites Science and Technology、Composites Part B、Composites Part A等期刊发表论文10余篇,被引400余次。
令狐昌鸿博士
新加坡南洋理工大学博士后研究员(导师高华健院士和夏焜校长讲席教授)。
浙江大学工程力学学士(导师宋吉舟教授、王高峰教授)和固体力学硕士(导师宋吉舟教授)、新加坡南洋理工大学固体力学博士(导师高华建院士和夏焜校长讲席教授)。长期致力于智能界面粘附力学及其应用、软物质力学、断裂力学研究。研究主要基于界面力学、物理和化学原理,揭示不同条件下界面粘附强度强弱控制的机理,探索界面粘附强度调控的规律;并基于此,利用智能材料和结构设计,研发自适应界面粘附系统,集成并应用于机器人、机械手、无人机、智能可穿戴、柔性电子器件、微纳组装、巨量微转移、生物医疗、超材料、航空航天航海等领域。在JMPS、EML、IJSS、PNAS、National Science Review、Science Advances、Nature Communications、npj Flexible Electronics、Advanced Functional Materials、Soft Matter等国际知名期刊上发表SCI论文30多篇,于Elsevier发表专著一章。授权中国国家发明专利7项,实用新型专利6项,申请国际专利2项。同时,担任Int. J. Smart. Nano. Mater.、SmartBot、Additive Manufacturing等国际期刊的青年编委,以及JMPS、Sci. Adv.、Adv. Funct. Mat.、Adv. Intell. Syst.、Adv. Robot. Res.、EML、IJMS 、Research、The Innovation 等十多本SCI期刊的审稿人。
