近日,由香港科技大学(HKUST)电子与计算机工程学系申亚京教授领导的研究团队,提出了一种基于数字通道的触觉交互系统,可以实时测量来自手不同部位的分布力,有望在医学评估、体育训练、机器人和虚拟现实(VR)等多个领域实现应用。

图1 基于液压、气压和机械弹簧原理的握力计
近几个世纪,基于液压、气压和机械弹簧原理的握力计是评估人手施加的力的常用方法,但它们只能提供最大力的信息,缺乏空间和时间的细节分布(图1)。柔性触觉仿生皮肤的发展为测量力的分布提供了新的机会,按其原理,可大致分为两类:基于电信号的阵列式传感(压阻式、电容式、压电、摩擦电等)和基于视觉的传感技术(Gelsight、Tactip、TacLINK、Insight等)。基于电信号的传感器在单点力测量时精度非常高,但存在大面积复杂接触变形时引起的串扰问题,出现精度下降。基于视觉的方法可以避免电信号的串扰问题,提供更高的鲁棒性,但其量程范围通常较小(通常<10N),且同样面临多点大面积接触时精度不足的问题。此外,其标定常需要大量数据集(通常>1GB)。简而言之,现有的柔性触觉传感方式获得的信息,本质上是来自多个未知负载源耦合的复杂模拟信号,这使得分布力的解码非常复杂,特别是对于多点大面积复杂接触的力分布,如手部的握力。
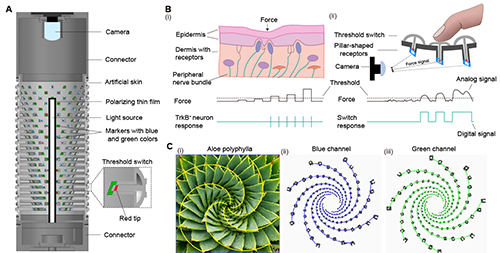
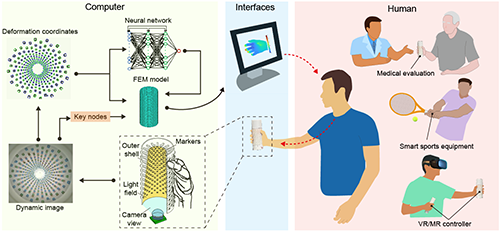
图3 PhyTac的工作机制及潜在的广泛应用。
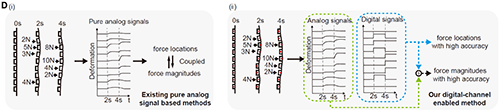
图4 引入数字通道后,分布力的位置与幅度均可精确重建。
“针对大规模分布式触觉传感技术,‘数字通道’的概念能够为解码力的位置提供一个新的维度,从而仅通过极小的数据集就可实现高精度和高鲁棒性。”申教授解释了这项研究的背景。
自然界中,螺旋女王芦荟的旋转叶序能够避免叶子互相遮挡,从而来最大化得捕获阳光(图2C)。受此启发,研究者将标记点以类似的螺旋结构排列以优化光路,使得PhyTac避免了由标记点互相遮挡引起的精度下降,并显著提高了标记点的分布密度,这最终提高了力的传感范围和分辨率。
图5展示了物理模型增强神经网络(FEM-NN)的原理及其在小数据集上的优势和高精度。FEM-NN的输入是由数字通道得到的关键节点(key nodesof interest, KOI)和位移矩阵,输出为增广刚度矩阵,其仅需要一个很小的数据集(45KB)。引入的物理模型建立了一个力学框架(FEM),将标记位移和力大小联系起来,并提供了包含PhyTac材料、几何和力学性能的宝贵先验知识。FEM-NN模型既采用了此力学先验知识,并得益于神经网络的强大拟合能力,有效地弥补了有限元模型与现实世界模型之间的物理缺失。结果表明,FEM-NN在整个量程范围(0.5 ~ 25 N)内均保持了较高的精度,力的平均绝对误差为0.11 N,平均相对误差仅为2.3%,优于传统基于纯物理模型的方法和基于卷积神经网络的方法(图5C)。

图5物理模型增强神经网络(FEM-NN)的原理

图6 正反手击球时力分布的对比

图7 在虚拟世界中精确操控鸡蛋、花瓶和软球(上图)。遥控机器人手抓取、握住和传递物体(下图)。
对于下一步的研究工作,团队计划将“数字通道”概念应用于其他几何形状的视触觉传感器上。他们认为,当克服干扰问题时,其他类型的分布式软触觉传感器,如电阻式和电容式传感器,也将从这项研究中获益。
“我们的目标是为物理世界、虚拟世界和机器人之间建立智能交互的桥梁。PhyTac是实现这一目标的重要一步。它加深了我们对手部动作的理解,我们期望它能成为一种以手为中心的媒介,在医学评估、体育训练、机器人和虚拟现实(VR)等多个领域实现应用。”该项目的负责人申亚京教授说道。
原文链接:https://www.science.org/doi/10.1126/sciadv.adt2641
