磁性软材料(MSM)可以不受束缚地控制并通过磁驱动快速行动,在软机器人和生物医学中有着广泛的应用。通常,MSM由嵌入软磁或硬磁颗粒的聚合基质组成。软磁材料具有低剩磁和矫顽力,易于再磁化并始终受到吸引力,可编程变形和可控运动始终受到限制。硬磁MSM材料具有高剩余力和矫顽力,允许编程非均匀磁化模式,以实现非均匀变形。
然而,硬磁MSM中磁化模式的重构通常需要强脉冲磁场或高温,并且难以在软磁和硬磁状态之间转换,从而限制了其在复杂环境下进行多模态磁操作的潜力。要实现这一目标,需要一种新的材料结构,可以在不需要强脉冲磁场或高温的情况下实现软硬磁状态和磁化曲线的重新配置。
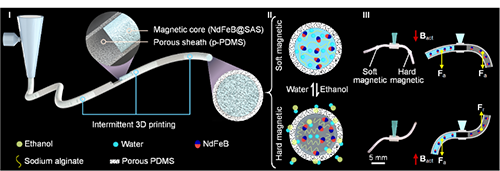
图1. 同轴磁性纤维打印工艺及软硬磁态可逆转换示意
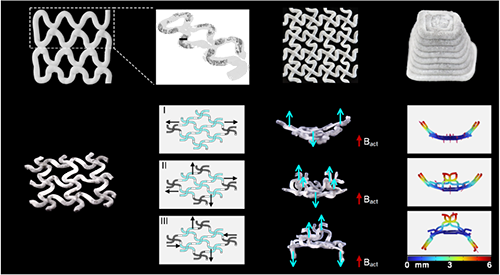
图2. 多维样品打印及定制化编程
-
CMF内的软磁或硬磁分布可以通过溶剂交换策略进行选择性编程,实现软磁状态(Hc 45 mT和Mr 16 emu/g)和硬磁状态(Hc 690 mT和Mr 61 emu/g)之间的转换,其矫顽力Hc和剩磁Mr分别存在约15倍和4倍的大数值差异。
-
CMF对全局磁场的响应可以在局部定制,以允许在CMF的各个区域的吸引力和排斥力共存,实现多模态磁主动变形和运动(图2)。
- 通过为仿生蝴蝶的硬磁翅膀和软磁身体设计不同的磁响应,实现了逼真的飞行行为,身体附着在树枝上,翅膀在周期性磁场的驱动下拍打(图3)。此外,磁性画笔将折纸物体描绘得栩栩如生,成功地再现了马良神笔故事中的场景(图3)。

图3.基于同轴磁性纤维的仿生蝴蝶及磁性画笔
该工作是蒋乐伦教授团队近期关于磁性材料研究的最新进展之一。在过去的两年中,团队探索了具有驱动和传感功能的同轴打印磁机械电气混合结构的纤维制造及应用(Nature Communications 2023,14,4428;ACS Appl. Mater. Interfaces 2021,13,3,4174–4184)。此外在磁响应软体机器人制造及表面微结构方面也有所进展,将卷对卷磁性纸制造方法与中国传统折纸技术结合,提供了磁控折纸机器人的2D-to-4D大规模制造策略大规模制造磁控折纸机器人(Nature Communications2022,13,4177)。团队还综述了磁响应微结构功能表面的研究进展,讨论了限制其实际应用的挑战,并提出了该领域的未开发展方向,对磁响应微结构功能表面领域的发展具有重要意义(International Journal of Extreme Manufacturing 2025, 7,012004)。团队还仿生蛞蝓研究了磁控软体微型机器人(TENG-Robot)它与摩擦纳米发电机完全集成,可用于板载传感和自供电充电(Nano Energy,2022, 99, 107367)。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202421254
