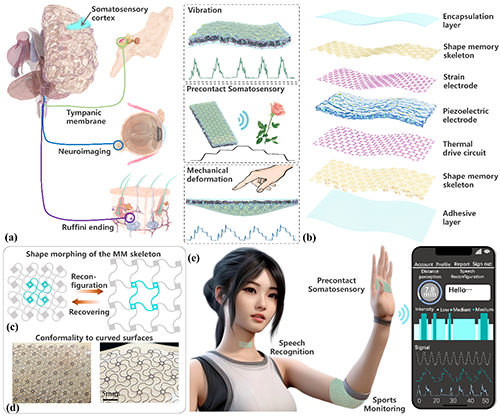
力学超材料由于具有优越的力学性能已被广泛应用于航空航天、柔性电子等多个领域。柔性电子器件与待测组织的紧密贴合与动态随形能力对测量数据的准确性至关重要,提升柔性电子器件的顺应性能显著降低器件的接触阻抗、提升信噪比、防止运动伪影的产生。然而由于生物组织和人造材料的不同性质及其界面的复杂性,实现身体随形的电子器件仍面临着突出挑战。利用具有自感知和形状记忆功能的材料制造智能力学超材料,有望协调柔性电子器件与不同生物组织之间的力学失调,并实现力学性能之外的主动功能,如传感、能量收集、致动、自适应、计算和信息处理。本文通过将形状记忆超材料和压电材料整合到电子皮肤结构中,实现了电子皮肤的多模态信号感知和形状记忆驱动功能,该电子皮肤在物联网、脑机接口等革命性领域具有广阔的应用前景。
哈尔滨工业大学冷劲松院士团队近日在Advanced Functional Materials上发表题为《Metamaterial-based Electronic Skin with Conformality and Multisensory Integration》的文章。
本文首先提出了具有马蹄形韧带的手性力学超材料结构,如图2(Ⅰ)(a)-(b),建立了柔性电子器件超材料结构化衬底的力学解析模型及参数化设计方法,为柔性衬底设计提供了结构基础和理论依据。根据解析模型研究了小变形条件下超材料几何参数对其宏观力学性能的影响,如图2(Ⅰ)(c)-(e)。通过实验和有限元模拟方法对大应变条件下超材料结构的非线性力学性能进行了表征如图1(Ⅱ)所示。对于具有相同拓扑图案和几何参数的超材料,马蹄韧带的平均伸长率增加约17%至约22%。因此,马蹄韧带极大地增强了超材料的拉伸性、负泊松比性能以及对动态非平面生物组织的高度保形和随形。值得注意的是,得益于超材料丰富的结构设计空间,所制备的超材料可以模拟特定生物组织的非线性力学行为,如图2(Ⅲ)(c)所示。此外,得益于其电驱动的形状记忆重构功能,超材料的仿生非线性力学性能可以在不同的生物组织之间进行转换,如图2(Ⅲ)(d)所示。例如,重建前后六手性力学超材料的非线性应力-应变响应分别与晶状体囊和皮肤相似。

图2. 超材料结构的力学解析模型。(Ⅰ)代表性(a)四韧带和(b)六韧带超材料结构。(Ⅱ)具有马蹄形韧带的(c)六韧带超材料等效弹性模量的理论结果。(d)具有马蹄韧带的四韧带超材料泊松比的理论结果。(Ⅲ)(a)四韧带和(b)六韧带超材料泊松比值随几何参数变化示意图。(c)超材料和组织/器官之间的σ-λ曲线比较。(d)超材料骨骼力学性能通过形状记忆效应在不同生物组织之间转换。
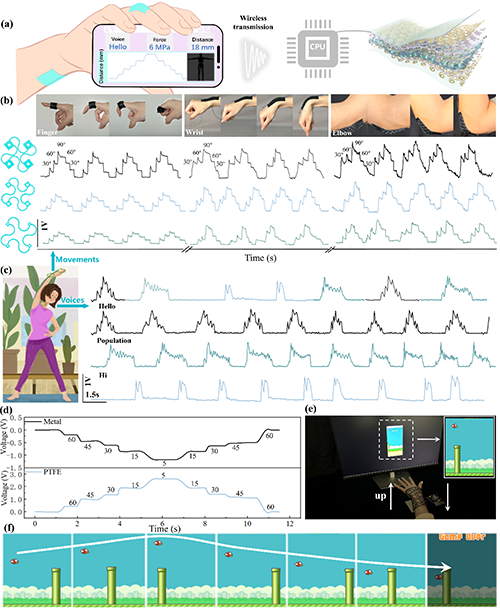
图3. 电子皮肤多模态传感功能示意图。(a)电子皮肤的无线数据收集系统,(b)使用不同超材料电子皮肤对手指、手腕和肘部弯曲角度进行实时监测,(c)不同单词的实时声学监测结果,(d)电子皮肤对近场目标距离的实时输出响应,(e)使用电子皮肤的近场距离识别功能操控体感游戏角色,(f)使用电子皮肤的非接触式距离感知功能控制游戏角色飞行高度的示意图。
综上所述,本文提出了一种基于力学超材料结构的电子皮肤,实现了其多模态融合感知和形状记忆重构功能。得益于形状记忆超材料骨骼结构及其力学解析模型,电子皮肤实现了仿生非线性力学行为和模仿目标生物组织力学性能的结构重构功能。基于钙钛矿的柔性传感器实现了生理运动信息的高精度收集以及听觉、触觉和预接触距离信号。此外,通过模仿生物多感官神经网络中的整合和交互功能,该系统实现了跨模态获取、识别和整合信息的高级认知功能。电子皮肤在运动监测、语音识别和体感游戏中的应用得到了证明。这种超材料电子皮肤在跨模态感知机器人系统和脑机接口等革命性领域具有广阔的应用前景。
冷劲松院士团队长期从事于智能结构力学及其应用研究。在航天领域,研制了基于形状记忆聚合物复合材料的可展开铰链、桁架、重力梯度杆、天线、太阳能电池、离轨帆、锁紧释放机构等智能结构(Sci. China. Technol. Sc., 2020, 63, 1436–1451; Smart Mater. Struct., 2022, 31, 025021; Compos. Struct., 2022, 280, 114918; AIAA J., 2021, 59, 2200-2213; Compos. Struct., 2022, 290, 115513; Compos. Struct., 2020, 232, 111561; Compos. Struct., 2019, 223, 110936.),可应用于各种卫星平台、空间站、探月工程、深空探测工程等。在柔性电子领域,设计并制备了具有力学和电学双重可重构特性的柔性压力传感器(Matter, 2023, 6(3), 940-962)。在力学超材料领域,设计了具有灵活功能导向特性的机械逻辑超材料、具有可编程载荷平台的阶梯式力学超材料、构型和力学性能可重构的拉胀力学超材料、像素力学超材料(Adv. Funct. Mater., 2024, 34, 2316181; Adv. Funct. Mater., 2024, 2408887; Adv. Funct. Mater., 2020, 30, 2004226; Adv. Funct. Mater., 2022, 32, 2107795)。在生物领域,基于形状记忆聚合物等智能材料开发了多种智能生物支架和人工假体(Biomaterials, 2022, 291, 121886; ACS Appl. Mater. Interfaces, 2022, 14, 42568-42577; Compos. Sci. Technol. 2019, 184,107866; Compos. Sci. Technol. 2021, 203, 108563; Compos. Sci. Technol. 2022, 209, 109671; Adv. Healthc. Mater. 2022, 22019975; Compos. Part A-Appl. S., 2019, 125, 105571; Adv. Funct. Mater., 2019, 29, 1906569; Adv. Healthc. Mater. 2022, 22019975)。冷劲松教授团队自主设计并研制的基于形状记忆聚合物的中国国旗锁紧展开机构,于2021年5月在天问一号上成功展开,使我国成为世界上首个将基于形状记忆聚合物复合材料的智能结构应用于深空探测工程的国家(Smart Mater. Struct., 2022, 31, 115008)。
论文链接:https://doi.org/10.1002/adfm.202406789
下载:《Metamaterial-based Electronic Skin with Conformality and Multisensory Integration》
- 哈工大冷劲松院士团队《Adv. Funct. Mater.》:一种具有灵活功能导向特性的组装力学超材料 2024-03-30
- 清华大学陈常青教授团队《Adv. Sci.》:力学超材料的信息编码和存储 2023-04-26
- 清华大学陈常青教授课题组《Nat. Commun.》:揭示可控局域化变形静态孤立子 2019-12-10
- 江南大学刘天西、董建成/韩国科学技术院Steve Park连发两篇 Adv. Mater.:在电子皮肤领域取得系列研究成果 2026-06-26
- 苏大张晓宏教授团队招聘博士后 - 人形机器人电子皮肤与多模态触觉感知方向 2026-06-17
- 浙江大学IBE团队蓝玲怡研究员 Nat. Commun.:仿生凝胶基电子皮肤压力传感器实现抓取过程中水果硬度的精准感知 2026-05-31
