在自然界中,许多生物组织,如肌肉、皮肤、神经、木材、叶子和花朵由高度定向排列的微结构组成,呈各向异性,是实现定向力传导、信号传递和驱动的关键机制。例如,松果定向原纤维失水和吸水驱动其开、关。在温度、湿度、光、力的刺激下,植物的各向异性结构发生动态构象变化,产生运动。近年来,国内外学者开发了大量各向异性的仿生驱动器和仿生传感器,但如何模仿生命体,研制驱动-传感一体化的智能新材料,构建具有自我感知功能的软驱动器,仍是有待研究的前沿课题,对智能软机器人的发展具有重要意义。
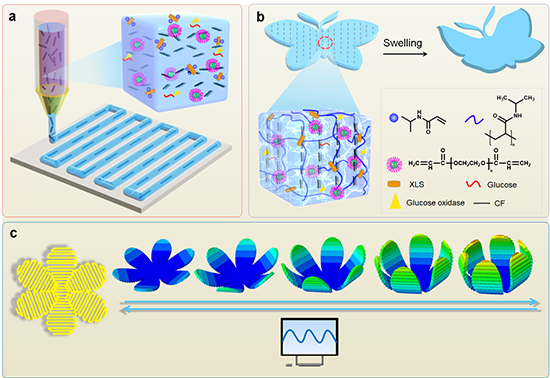
图1 仿生4D打印各向异性自传感驱动器
中山大学材料科学与工程学院付俊教授团队致力于研究高性能仿生柔性驱动器(Mater Horiz 2023, 10.1039/D3MH00718A; Chem Eng J 2022, 450 138346; ACS Appl Mater Interfaces 2020, 12, 26476)和传感器(Mater Horiz 2020, 7, 1872-1882; J Mater Chem B 2021, 9, 4423-4443; Langmuir 2022, 38, 11503-11513; J Polym Sci 2022, 60, 2605-2606),报道了感知-驱动一体化的碳纤维复合水凝胶器件(Adv Funct Mater 2023, 33, 2211189)。
该团队的最新进展报道了4D打印仿生各向异性的自感知水凝胶驱动器(图1)。以短碳纤维/温敏水凝胶前驱液为墨水,利用挤出式3D打印的剪切力使短碳纤维(长约1 mm)在聚异丙基丙烯酰胺(PNIPAM)水凝胶内部定向排列,形成各向异性结构。碳纤维的取向排列使温敏水凝胶呈温度响应各向异性:当温度改变时,水凝胶在平行于碳纤维方向和垂直于碳纤维方向的溶胀或收缩率不同,不均匀的溶胀和收缩产生内应力,驱动变形。精确调控打印路径、定义碳纤维的取向方向,可灵活地调节水凝胶的形变路径。利用有限元分析(FEA)可以对变形进行模拟和设计(图2),构筑了多种仿生软驱动器(如捕蝇草和蝴蝶),实现了可控的温敏变形驱动(图2)。

图2 (a, b)水凝胶的打印路径及(c, d)水凝胶在常温水溶液中的变形和有限元模拟。标尺:5 mm。(e)捕蝇草及仿捕蝇草4D打印的水凝胶。(f)蝴蝶及仿蝴蝶4D打印的水凝胶。标尺:5mm。
碳纤维的高电导率和取向结构赋予复合水凝胶较好的传感性能。作者系统地研究了打印路径、水凝胶图案、网格结构等不同几何特征对传感性能的影响,研究发现,当碳纤维排列方向与拉伸方向相同时,此时的灵敏度最高且检测范围最大(图3)。将这种传感器贴附在手腕,手肘等关节处,能够实时监测关节的运动(图4a, b);将其贴附于声带,能够检测喝水和说话导致的微弱的振动(图4c, d)。
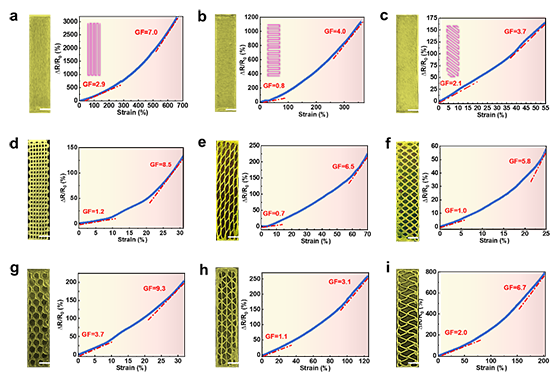
图3 沿(a)平行、(b)垂直于拉伸方向和(c)与拉伸方向成45o角打印的水凝胶的灵敏度。(d-i)不同网格结构水凝胶的灵敏度。标尺:5mm。
短碳纤维复合水凝胶的传感性能主要源于碳纤维在凝胶变形过程中的相对滑移。当温度改变时,水凝胶发生变形,其内部的碳纤维会随之发生相对移动,导致水凝胶电阻的变化。这就为驱动-传感一体化提供了可能。该团队打印了花瓣形和蝴蝶形的温敏复合水凝胶驱动器,调节温度,在水凝胶驱动过程中实时监测材料电阻率变化,当水凝胶驱动器在25℃和50℃之间反复驱动过程中,检测到稳定、可重复的电阻变化,二者呈现很强的相关性(图4f, h)。因此,该研究实现了对水凝胶驱动的自我监测。该方法可为智能软机器人的自我感知和反馈系统提供一定的启发。
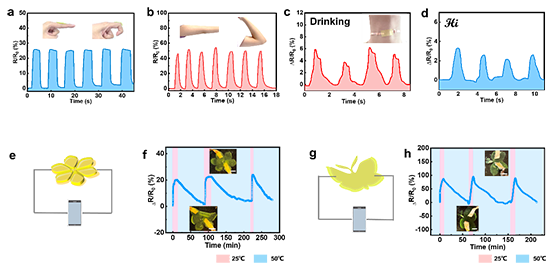
图4 水凝胶传感器监测(a)手指、(b)肘部的运动信号,以及声带在(c)喝水、(d)说“嗨”时的信号。(e)花形驱动器的自感知原理图及(f)在25℃和50℃下可逆驱动的信号。(j)蝶形驱动器的自感知原理图及(h)在25℃和50℃下翅膀挥舞时的信号。标尺:5 mm。
该研究开发了一种方便、可编程的仿生各向异性水凝胶驱动器的制备方法,为软驱动器与传感器的集成开辟了一条道路,对于智能软机器人的开发和应用具有重要的意义。
该工作以“4D Printing of Biomimetic Anisotropic Self-sensing Hydrogel Actuators”为题发表在Chemical Engineering Journal。
该工作得到了国家自然科学基金(51873224)的支持。
论文链接:https://authors.elsevier.com/a/1hbs8_VWlWH2ml
付俊教授简介

中科院“百人计划”、中山大学“百人计划”、浙江省杰出青年基金入选者。Wiley出版社J Polym Sci编辑,英国皇家学会学术期刊J Mater Chem B和Materials Advances编委。博士毕业于中国科学院长春应用化学研究所高分子物理与化学国家重点实验室。先后在德国马普高分子研究所、美国哈佛医学院附属麻省总医院、中科院宁波材料所工作。2019年加入中山大学材料科学与工程学院,任教授,博导。主要从事高性能与智能仿生柔性材料、柔性传感与可穿戴设备、水凝胶组织工程材料、生物3D打印等方面的基础研究与应用技术开发。
相关成果已在Adv Mater, Adv Funct Mater, Chem Eng J, Mater Horiz, Chem Mater, ACS Appl Mater Interfaces, Chem Commun, ACS Macro Lett, Macromolecules等高水平期刊发表论文140多篇,出版英文专著1部,全部论文累计被引用8400余次,H指数50,授权美国发明专利1项,中国发明专利20多项。获英国皇家化学会2020年Materials Horizons Outstanding Paper-Runners-up Award等奖项。
团队常年招聘高分子、生物材料、水凝胶、柔性传感、柔性驱动等方向的副教授、助理教授、研究助理教授、研究副教授、科研博士后等。欢迎青年学子报考本团队硕士、博士研究生。课题组主页:
https://mse.sysu.edu.cn/teacher/98
http://www.polymer.cn/ss/fujun/index.html
https://scholar.google.com/citations?hl=zh-CN&user=_G1QhgEAAAAJ&view_op=list_works&sortby=pubdate
- 西南交大孟凡彬教授团队 Adv. Mater.:突破静态限制!仿生4D打印解锁动态自适应电磁调制新范式 2026-06-06
- 哈工大冷劲松/哈医大郭媛媛 AFM:抗凝促内皮化4D打印心脏封堵器 2026-04-01
- 哈尔滨工业大学冷劲松教授团队《Adv. Mater.》:4D打印水凝胶实现高效大气集水 2026-01-02
- 四川大学丁明明教授团队《Adv. Sci.》:仿生聚电解质构象转导放大用于铁代谢超灵敏成像 2026-08-03
- 浙江大学柏浩教授团队《Adv. Mater.》:白鲢鱼鳔“以柔克刚”的各向同性抗疲劳机制 2026-07-24
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 中国科大梁海弋教授团队 Adv. Mater.: 取向致密化与甘油塑化协同构筑超强韧各向异性PVA有机凝胶 2026-07-30
