南开大学刘遵峰教授《Adv. Funct. Mater.》综述:基于柔性致动器的跳跃运动
2023-05-21 来源:高分子科技
在自然界中,袋鼠、青蛙和跳蚤等生物通常借助瞬间跳跃来捕捉食物或躲避危险。它们主要通过调节自身形状以达到所需的跳跃高度或距离,这为研究人员设计跳跃机器人提供了灵感。与传统的刚性机器人相比,软机器人由于其灵活性、重量轻、可编程、多功能性和适应性等特点,被应用于结构化、非结构化环境中。柔性致动器作为软机器人的主要构造部分,可在外部环境刺激下如光、电场、蒸汽等,产生可逆机械变形,在跳跃运动领域具有巨大的潜力。
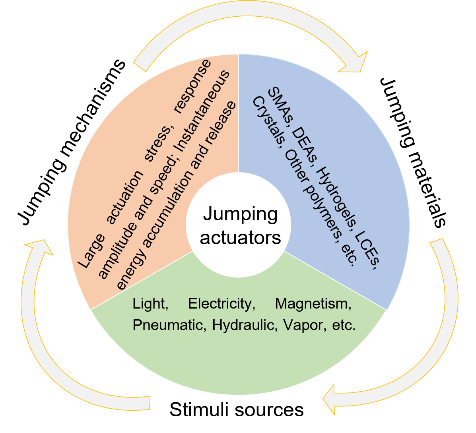
图 1. 关于跳跃柔性致动器的研究进展重点阐述内容分类
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202300156
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 暨大刘明贤教授团队:基于非对称PVA/C/PE双层膜的光驱动柔性执行器和多功能传感器 2023-10-01
