织物应变传感器巨大的进展已经为舒适佩戴的柔性电子产品开辟了一条途径,其多孔织物的微观结构,具有十分显著的透气性和低模量,这使其具备良好的生物兼容性和佩戴舒适性。织物应变传感器的关键挑战之一是如何实现按需设计调节传感器响应,以适应各种应用场景,充分利用高的灵敏度。虽然研究报道了改变电活性材料和纤维取向调控的多种方法,但在不影响宏观力学性能的前提下,将不同响应的应变传感器集成到单一衬底的策略仍然十分值得关注。

图1 所提出的调节表皮织物应变传感器响应的力学策略示意图
近期,华中科技大学机械科学与工程学院/智能制造装备与技术全国重点实验室黄永安教授团队提出了一种简单的力学策略,该策略通过在预拉伸状态下的纤维毡表面沉积图案化的电活性功能材料(例如金),覆盖电活性材料的表层纤维在纤维毡释放预拉伸后仍然保持预拉伸状态的排列取向,控制预应变的方向和大小能够形成具有不同响应的应变敏感传感单元或应变不敏感的互连引线。本文通过系统的研究揭示了该策略的底层机理,并且能够为织物应变传感器的按需设计和制造提供指导。运动监测绷带和手势识别手套的应用展示了表皮传感器的巨大潜力。该工作以“Response Regulation for Epidermal Fabric Strain Sensors via Mechanical Strategy”为题发表在《Advanced Functional Materials》上,华中科技大学机械科学与工程学院黄永安教授和厉侃教授为本文共同通讯作者,博士研究生白云昭为本文第一作者,参与人员还有硕士生殷黎婷、博士生侯超、周赟磊博士后、张帆副教授和博士生徐章宇。本研究获国家重点研发计划、国家自然科学基金项目、中央高校基本科研项目和科学探索奖的资助。
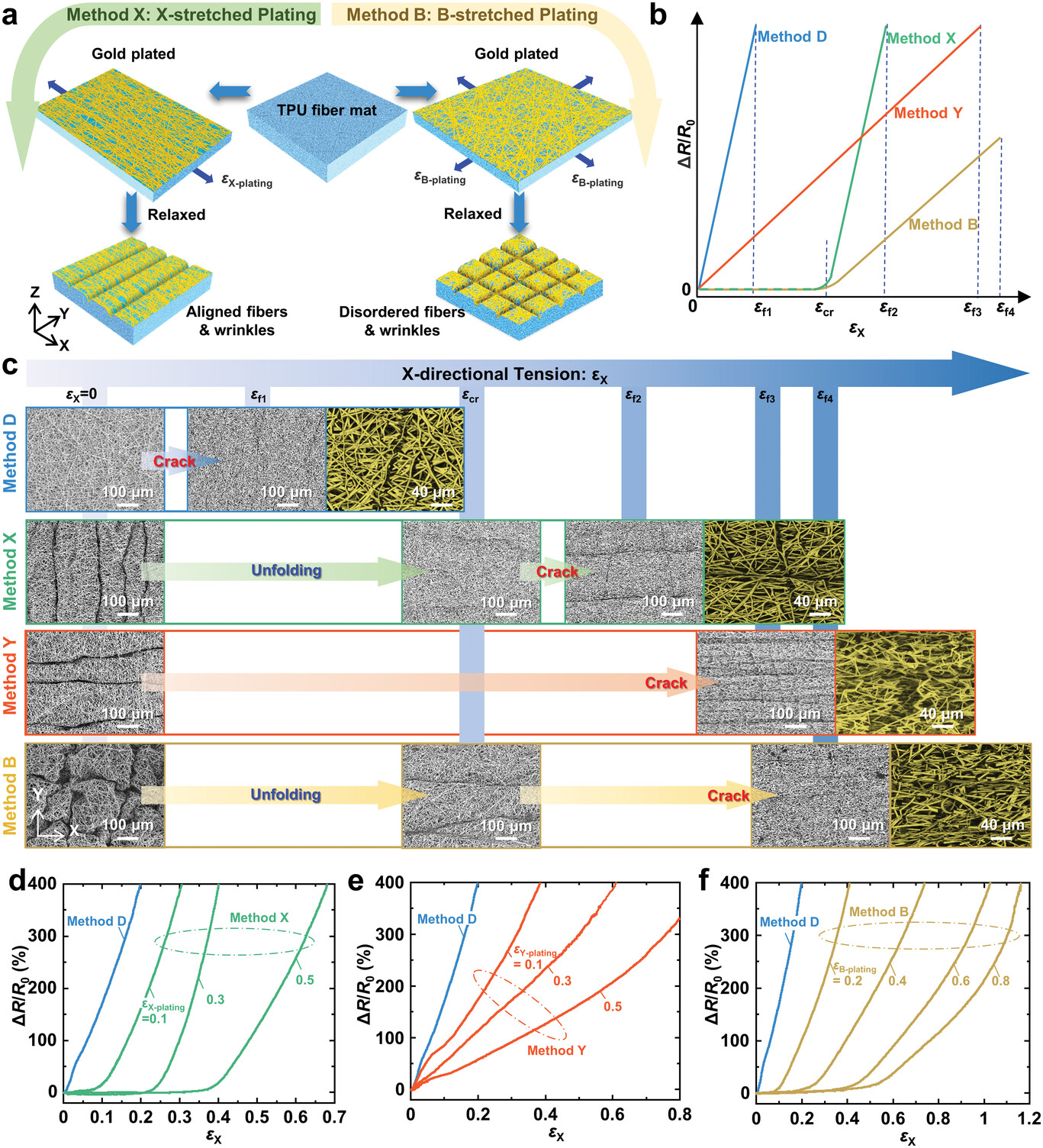
图2 预拉伸方向和预应变对传感器响应的影响
本文提出了一种力学引导的设计和制造策略,表现为在无序排列的纤维垫的顶表面上引入具有规定的纤维排列的电活性材料(例如金)。该策略通过在预拉伸状态下沉积而不是传统策略中直接沉积电活性材料层,沉积电活性层后释放预拉伸即完成了该过程。该策略适用于多种纤维毡材料,在这项工作中使用了具备良好拉伸能力的热塑性聚氨酯(TPU, Tecoflex SG-80A)。这种方式仅对很薄厚度范围内的表面层纤维有效,镀金的表层纤维能够保持预拉伸状态下的排列程度,镀金层的厚度通常低于10μm,比整体厚度(≈50-300μm)薄得多,不会影响厚度方向上其余无序部分。因此,可以通过这种简单的机械策略制造具有调节测量范围和灵敏度的织物应变传感器。具体来说,测量范围(线性度为 R2>0.978)可以从0.25(无序纤维排列)和0.9(沿载荷方向预应变0.5)调节,能够准确捕获指关节的最小应变及肩部大应变等部位的需求。综合实验揭示了该策略的底层机理,理论分析总结了按需调控传感器性能的关键因素。将所提出的策略与传统预拉伸策略结合实现传感-导电网络的按需制备,系统的实验总结了调控规律,为单一电活性材料及单一衬底材料的传感导电网络的制备提供了指导方案。

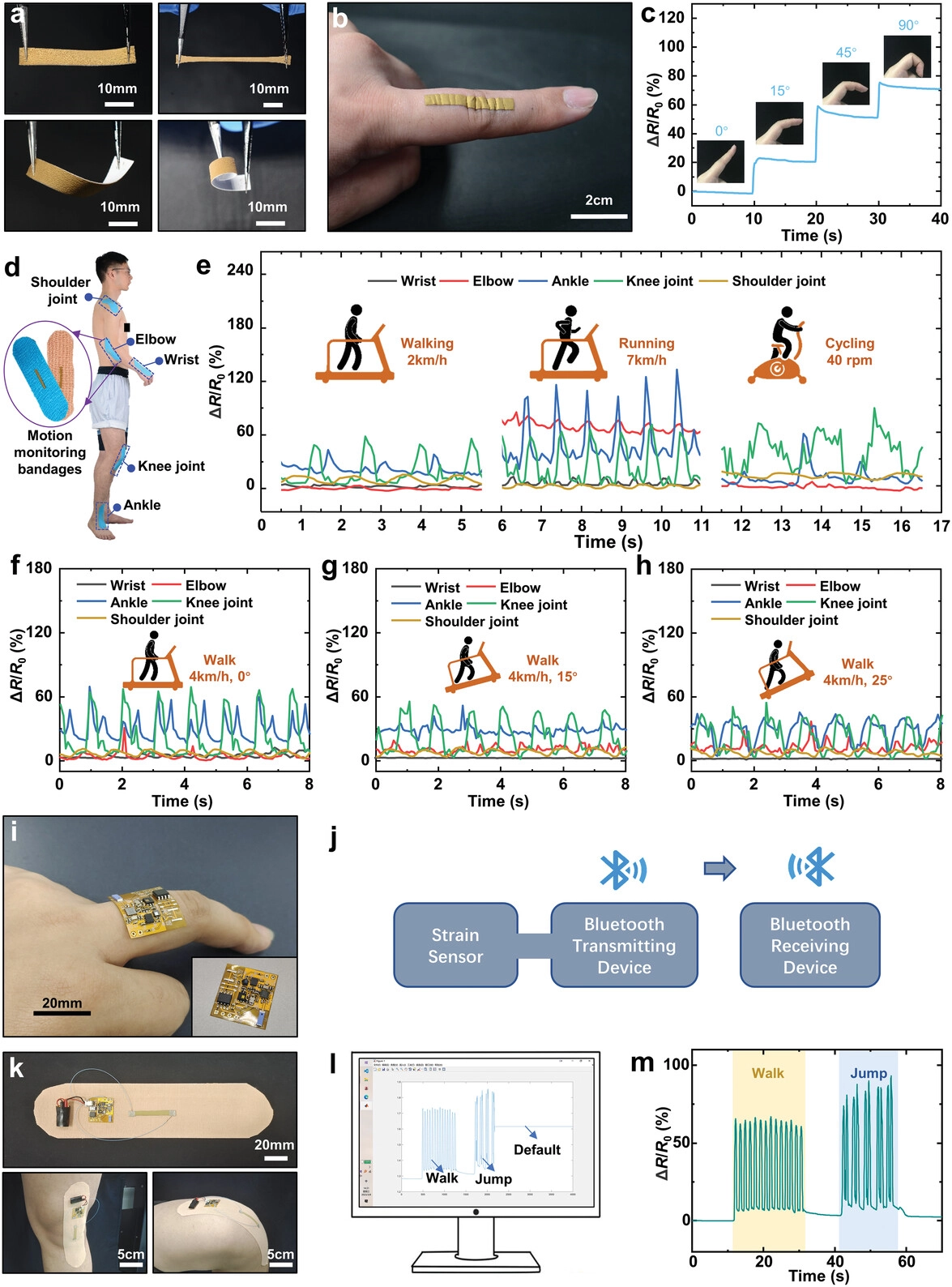
图3 通过方法Y制造的传感器的动态行为,预应变为50%
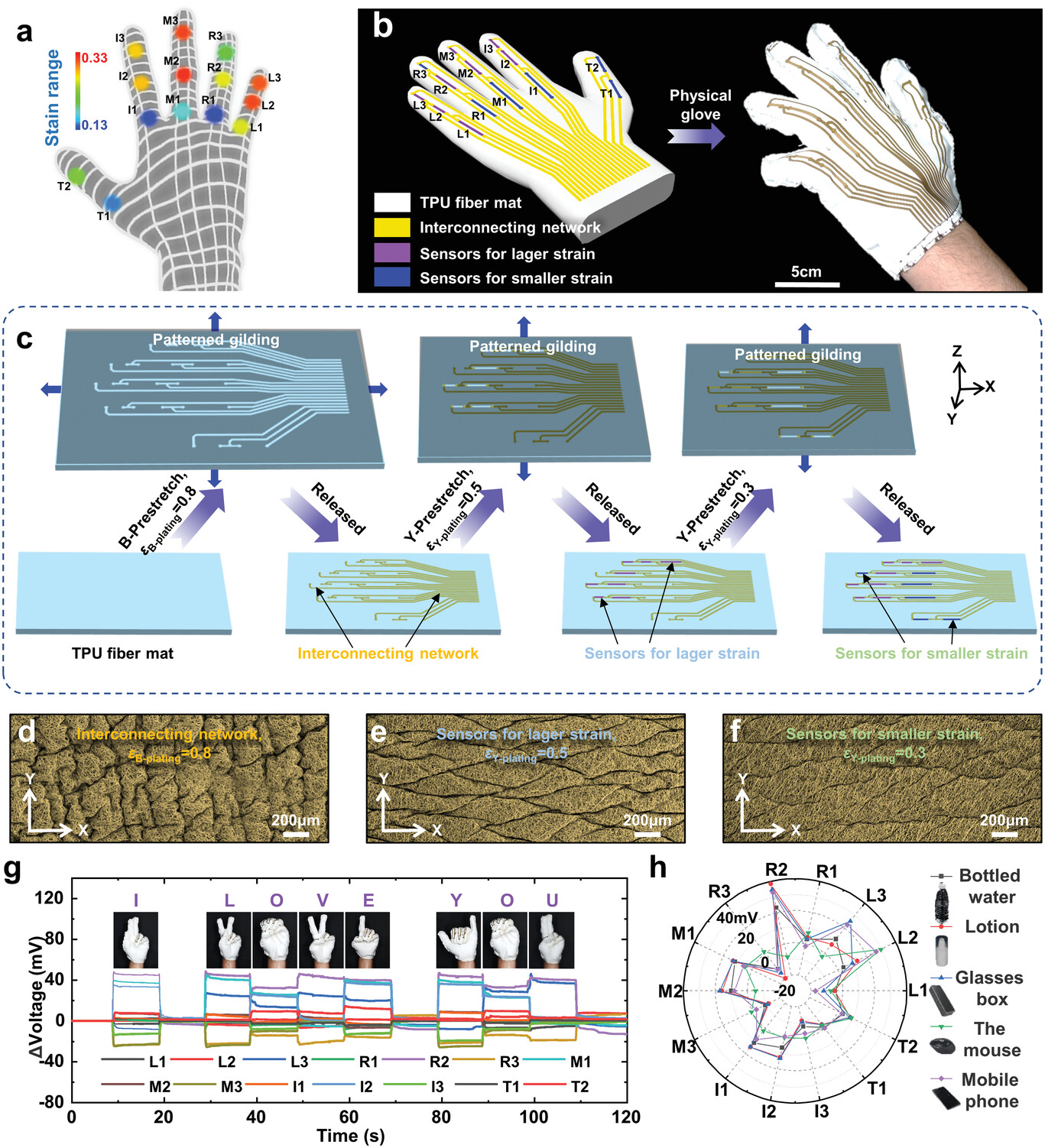
该传感器不仅具备良好的传感性能,还具备优越的生物兼容性和佩戴舒适性。在使用场景方面,该传感器不仅能够直接共形贴附于皮肤表面,也可以与运动绷带集成,还能够直接裁剪缝合制备成可穿戴电子织物。我们为不同表皮测量场景(例如,手指、肘部等)的按需制造应变传感器提供了演示示例。带有14个不同测量范围的应变传感器的手势识别手套表明了该策略的优越性,即可以在单个织物垫上通过预拉伸调节传感器性能。该策略可以在表皮电子和可穿戴柔性电子中找到广泛的用途。
该工作为织物应变传感器的按需设计开发了一种力学策略,以便传感器的响应(即测量范围和灵敏度)可以在制造过程中进行调节。该工艺将TPU纤维垫的表面的纤维层以预拉伸状态镀上金层,从而能够以设计的方式保持纤维方向。与传统的更换材料体系或调整整体纤维方向的策略相比,该策略可以调节单个衬底上多个传感器的响应,对其力学性能的影响很小。详细的力学分析阐明了其机理和关键因素的影响,可为复杂传感系统的研究提供指导。运动监测绷带和手势识别手套中的设备演示展示了出色的力学灵活性和调节多个传感器响应的能力。所提出的响应调节策略在各种织物传感器中具有普遍的适用性,因此在表皮电子器件的设计和制造中具有广阔的应用前景。
原文链接:https://onlinelibrary.wiley.com/doi/full/10.1002/adfm.202214119
该工作是团队近期关于可穿戴表皮电子相关的最新进展之一。团队在柔性电子器件与应用、微纳制造工艺与装备领域深耕多年,具备一流的实验室环境。团队长期招聘博后、工程师,招收研究生,有兴趣进一步了解可关注团队公众号:柔性电子制造团队。
作者介绍:
黄永安(Huang Yongan,Professor),智能制造装备与技术全国重点实验室副主任;国家杰出青年科学基金获得者,国家重点研发项目首席科学家,“科学探索奖”获得者;华中科技大学“柔性电子制造团队带头人”、“ChinaMaker创新团队创始人”。致力于新兴柔性电子技术研究,包括:柔性电子器件与系统(穿戴式电子系统、飞行器智能蒙皮、机器人电子皮肤、柔性显示等)和柔性电子制造与装备(高精度喷印制造、激光剥离/巨量转移、复杂曲面电子制造、微等离子体加工、机器人化制造等)。在Science Advances、Nature Communications、Advanced Materials、Advanced Functional Materials、Nano Energy等期刊发表SCI论文100余篇,出版中文著作2部、英文著作2部,获得授权国家发明专利近100项,美国专利4项,成果获得重大转化;获得湖北省自然科学一等奖、湖北省技术发明一等奖、陕西省科学技术一等奖、瑞士日内瓦国际发明金奖/特别金奖。
厉侃(Li Kan, Research Fellow),教授,博士生导师。华中科技大学“华中学者”,国家自然科学基金优秀青年科学基金项目(海外)获得者,东湖青年学者。2014年毕业于清华大学航空航天学院工程力学系(钱学森力学班),同年10月前往美国西北大学(Northwestern University)黄永刚院士课题组攻读博士学位,2019年3月获得博士学位,随后前往英国剑桥大学(University of Cambridge)Norman A. Fleck院士课题组做博士后,2021年12月加入华中科技大学机械科学与工程学院担任教授。迄今在Nature(封面)、Nature Communications、Science Advances、PNAS、Advanced Materials、Advanced Functional Materials、Small等国际顶级期刊发表论文30余篇,他引2000余次。
团队介绍:
一、柔性电子制造团队研究方向:
柔性电子器件与应用(穿戴式电子系统、飞行器智能蒙皮、机器人电子皮肤、柔性显示、三维柔性微飞行器、三维柔性可拉伸电子器件等)
微纳制造工艺与装备(高精度喷印制造、激光剥离/巨量转移、复杂曲面电子制造、微等离子体加工、机器人化制造等)
二、柔性电子应用领域:
智能蒙皮具有自诊断、自适应、自学习、自修复能力,能够极大提高飞行器的飞行速度、操作机动性、环境感知和安全维护能力,是改变未来先进飞行器设计的一项革命性新技术。
电子皮肤具有仿人触觉功能,对冷热、软硬、动静、材质等进行感知,是共融机器人的核心技术,为人机交互奠定基础。
表皮电子作为一种可嵌入或覆盖人体的高精尖装置,能够跟随人体皮肤或器官同步变形,在信息、健康医疗、脑科学与人机融合、国防等领域产生巨大影响。
柔性显示具有柔性、大面积、高分辨率等特点,新型印刷显示、MicroLED显示将带来产业技术革命,引领未来新型显示产业的方向。
微型飞行器(MAV, Micro Air Vehicle)是未来新型飞行器的重点发展方向之一,在科学、军事和测绘领域均展示出巨大的应用前景。因受其主动驱动、控制和能源供给系统模块限制,微飞行器小型化极为困难,以往报道的最小的微飞行器尺寸大约为3~6厘米。通过仿生风传播种子的三维结构,如蒲公英和枫树种子,设计出的三维柔性微飞行器可在空气中以极小的终端速度自由下落,实现较长的滞空时间,并可随风自由飞行几十、甚至几百公里。这一工作将微飞行器的最小尺寸极限推进至小于500微米,并通过集成柔性电子电路实现了如空气污染物监测等功能。课题组将继续探索三维柔性微飞行器在深空探测、碳捕获、可播撒物联网集群等不同领域的应用。
三维微结构具有二维结构所不具备的非常规多物理场特性(即热、电磁、机械、动力学、光学等)。因此,三维柔性、可拉伸电子器件可以实现传统二维器件无法实现的功能。例如,三维可拉伸电子固态封装下的超高拉伸性、三维柔性储能设备的高空间利用率、三维光电器件的高能量转换效率等。
三、柔性电子制造实验室:
建立了一流的柔性电子制造实验室,开发了一批电流体喷印制造装备、曲面电子共形制造装备、机器人化曲面电子加工装备、激光剥离装备、MicroLED巨量转移装备等特有的制造装备实现了大面积、高柔性、非平面功能器件的设计与制造。
- 武汉理工大学何大平、刘波/西湖大学黄嘉兴 Nat. Commun.:破解界面相互作用困境 - 实现日常织物保形石墨烯涂层宏量制备 2026-05-21
- 中国科大龚兴龙教授课题组《Adv. Mater.》:非对称Janus结构剪切增稠Kevlar织物 - 实现冲击防护和动态热管理一体化设计 2026-04-23
- 武汉大学吴伟教授团队 AFM:用于下一代自适应可穿戴设备的全印刷温度-压力双模传感电子织物 2026-04-22
- 华南理工大学殷盼超教授/杨俊升副研究员团队《ACS AMI》:基于光响应调控分子颗粒材料粘弹性 2024-04-08
- 合工大殷俊教授课题组 AFM:具有可见光激活的自愈型可再生水性聚氨酯应变传感器 2025-05-13
- 苏州大学李刚教授课题组 Compos. Sci. Technol.: 适用于数字医疗中不同微环境的自适应响应能力的柔性应变传感器 2025-02-02
- 中山大学吴进等 AFM:基于定制裂纹设计的超灵敏透气水凝胶纤维应变传感器及无线手语识别应用 2024-11-29
