近年来,生物融合技术(biohybrid/living approach)已经成为一种新兴的构建柔性功能器件及软体机器人的方法。通过结合功能性生物体和人工合成材料,生物融合系统可以再现自然界生物的多种特征,如复杂的功能、自主的控制、高效的能量利用率以及对刺激的高度灵敏性。尽管如此,现有的生物融合系统的功能仍局限于以下三种类型:基于心肌/肌肉细胞的收缩运动构建的驱动器;基于细菌类(如大肠杆菌)感知行为构建的化学传感器;基于生物体的新陈代谢(如酵母菌的呼吸作用)来调控合成材料的性质。虽然力学刺激是自然界中最基本的信号之一,却鲜有研究报道具有力学感知特性的生物融合器件。此外,如何用简易的方法制造生物融合器件、延长其使用寿命、缩短其感知刺激的响应时间、降低其维护成本,仍然是制约其工程应用的关键因素。
针对该问题,受海洋发光生物的启发,加州大学圣地亚哥分校(UCSD)蔡盛强教授团队,提出了一种简单方法来构建强韧的生物融合力致发光体系。通过将海洋发光甲藻溶液封装到弹性体空腔中,研究者实现了高度强韧且无需电子器件的柔性生物融合力致发光器件。甲藻细胞具有超高的灵敏度(Pa~kPa),在力学刺激下实现近乎瞬时的响应(~20ms),无需特殊维护即可维持其发光能力至少一个月。该设计可轻易地集成到软体机器人中,为黑暗中工作的机器人赋予全新功能,如对外界力学刺激的可视化、在驱动变形下实现发光照明、以及可编程的光学图案用于信号传递。
1.生物融合力致发光器件的潜在应用

图1.生物融合力致发光软体机器人的工作原理及其在黑暗环境中的潜在应用
2.柔性生物融合力致发光器件的设计
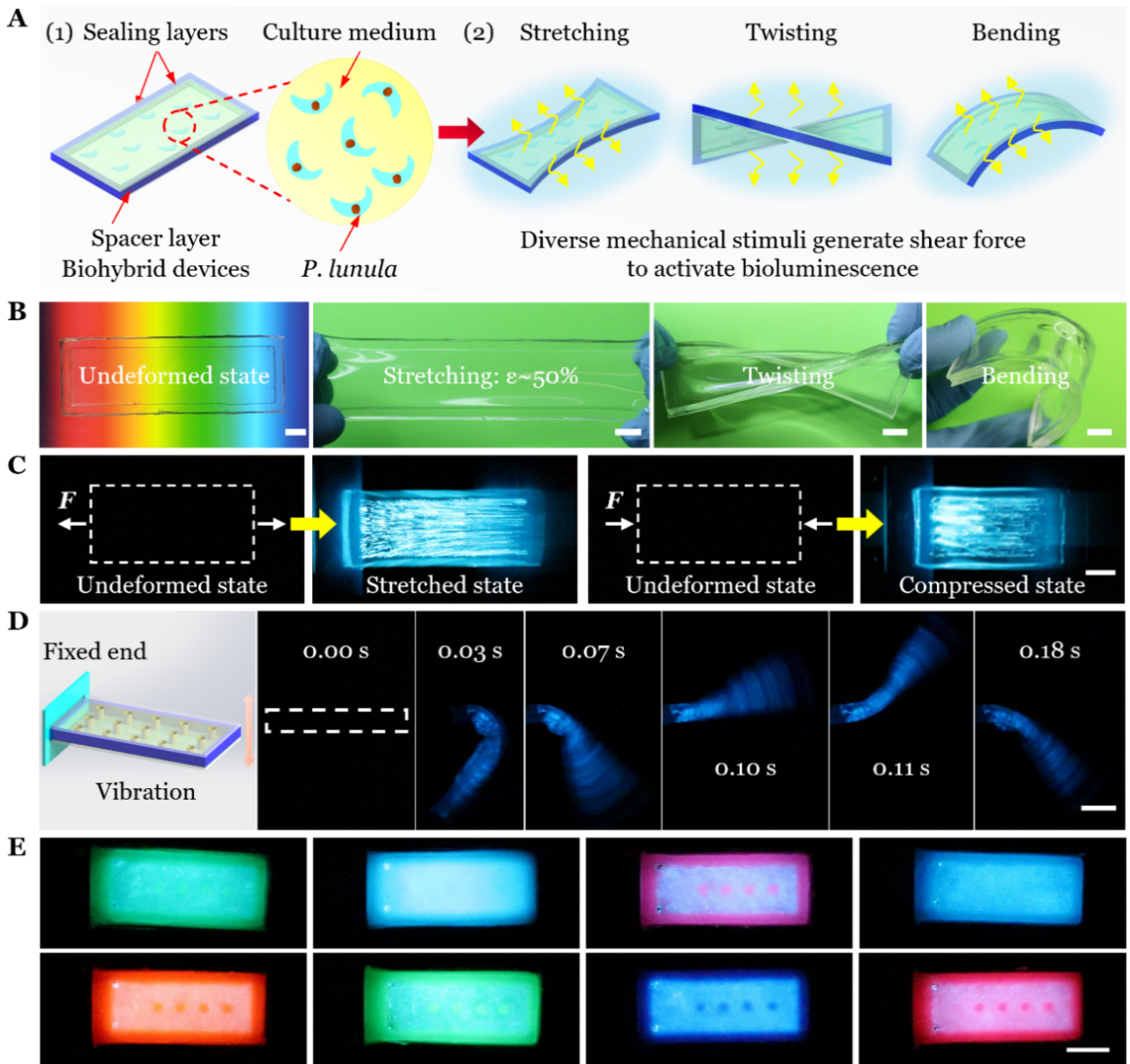
图2.生物融合力致发光器件的设计、工作原理和简单展示
3.柔性生物融合力致发光器件的表征
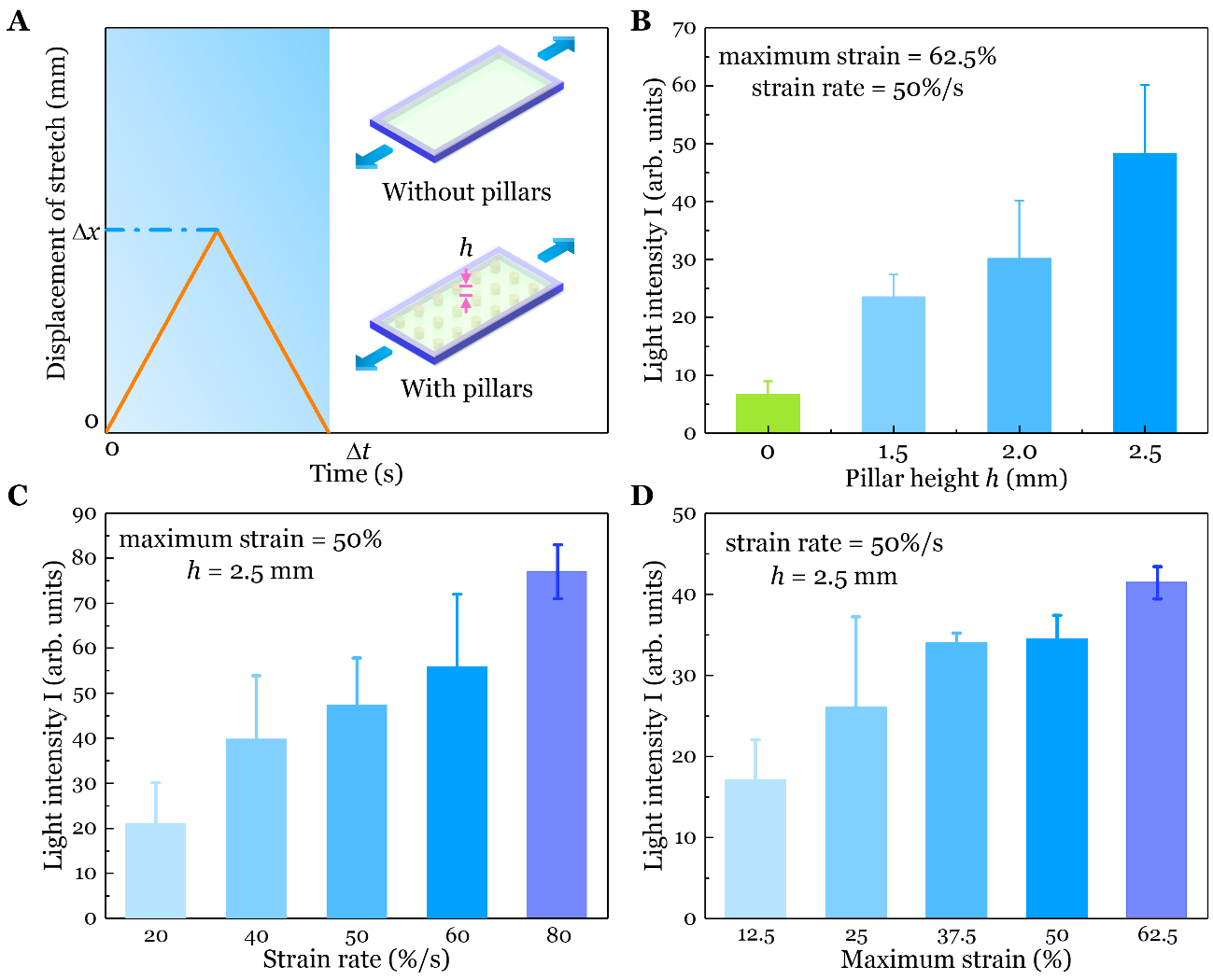
图3.力致发光器件在不同力学加载条件下的发光强度
4.力致发光器件用于实现外部力学扰动的可视化
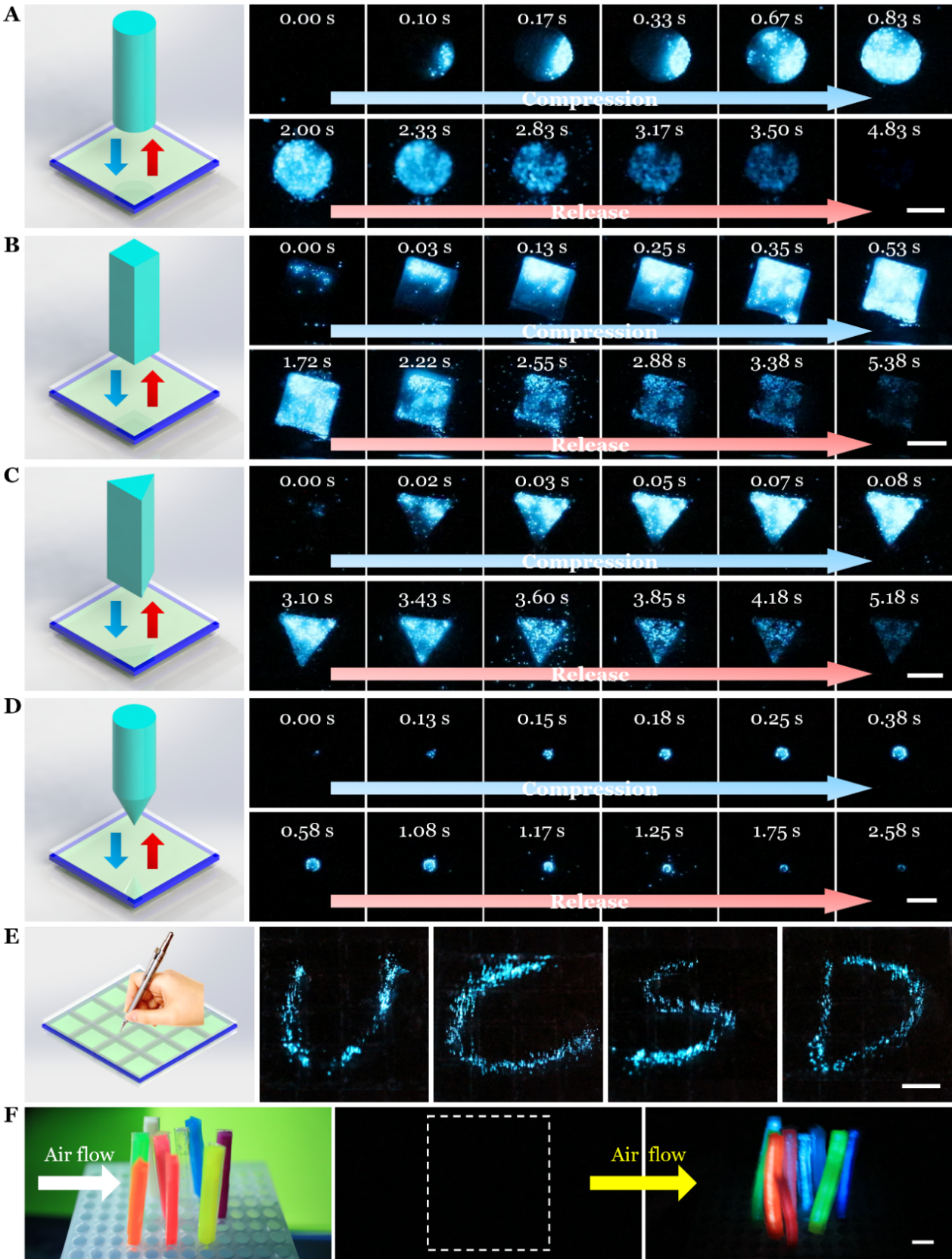
图4.通过接触式和非接触式刺激激活力致发光器件,以用于外部力学扰动的可视化
5.力致发光软体机器人用于照亮黑暗环境
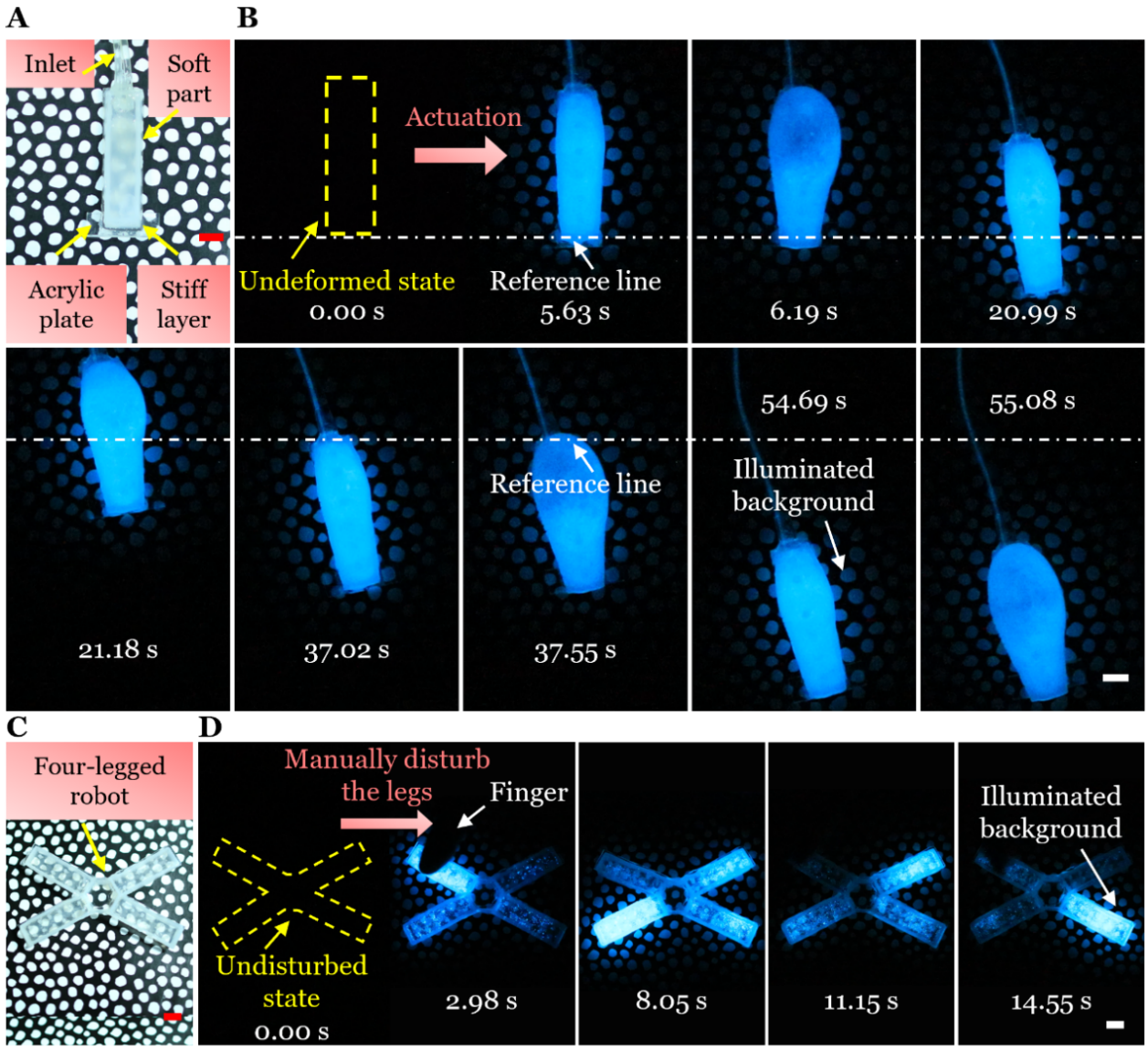
图5.在黑暗环境中,力致发光机器人在主动驱动或被动扰动下的照明功能
6.力致发光软体机器人用于黑暗环境中的信号传递

图6.在黑暗环境中,通过驱动力致发光机器人显示不同的图案,以用于信号传递
7.具有封闭系统的磁控力致发光软体机器人

图7.具有封闭系统的不受束缚的磁控力致发光机器人
总而言之,该研究提出了一种简单方法,将发光细胞与弹性体空腔相结合,构建了高度强韧和高能量利用率的柔性生物融合力致发光器件,并展示了其在软体机器人中的潜在应用。此外,该型器件具有高灵敏度(Pa~kPa),快速响应时间(~20ms),无需特殊维护即可维持其发光能力至少4周。
该工作近期发表于Nature Communications。UCSD博士生李成海为第一作者,UCSD蔡盛强教授为通讯作者,生物发光专家Michael I. Latz教授(SIO, UCSD)为该研究了提供了强力支持。
原文链接:
Highly robust and soft biohybrid mechanoluminescence for optical signaling and illumination
Chenghai Li, Qiguang He, Yang Wang, Zhijian Wang, Zijun Wang, Raja Annapooranan, Michael I Latz, Shengqiang Cai
https://www.nature.com/articles/s41467-022-31705-6
- UCSD蔡盛强教授团队《Sci. Adv.》:超灵敏且强韧的力致发光活性软材料 2023-10-23
- 西工程大樊威教授/西安交大王淑娟教授 Adv. Mater.:“一纤双色”力致发光纤维问世 - 可穿戴设备迎来“无电发光”新突破 2025-11-21
- 中国科大龚兴龙教授课题组《Adv. Funct. Mater.》:基于剪切变硬的力致发光器件用于力-热耦合防护和冲击可视化 2024-09-11
- 西工大黄维院士/于涛教授《Adv. Mater.》:赋予有机力致发光分子可逆光致变色特性以实现“光开关”力致发光 2023-03-17
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 深圳大学黄龙彪教授团队 《Adv. Sci.》综述:生物可降解材料在软体机器人与柔性电子领域的研究进展 2025-09-10
