区别于传统的具有机械结构的刚性机器人,软体机器人以其灵巧的结构变化的优势被成功地应用于易碎货物抓取、生物仿生学智能电子、和体内药物精准递送等领域。机器人的特殊功能实现往往取决于其灵巧的结构变化。对于磁控软体机器人,其变形主要由其磁化形式决定,因此实现可编程磁化能够提高机器人的变形多样性。目前报道的磁控软体机器人由于磁化形式的约束,其变形多为弯折变形,而具有多个曲面变形结构的磁控软体机器人鲜有报道,这也是目前研究的一大难点。同时,实现机器人的多功能性,比如环境感知,定位等能够进一步增强其作用效果以及扩展其应用领域。而多种材料的无缝整合可以实现这一目的,这也是目前小尺度软体机器人研究的热点。
鉴于以上磁控软体机器人存在的问题,香港中文大学机械与自动化工程学系张立教授团队,与香港城市大学生物医学工程学系张甲晨教授团队和卡耐基梅隆大学机械工程系Carmel Majidi教授团队合作,成功开发出模块组装的策略,用于可编程磁控多功能软体机器人的研究及其应用。该策略可实现机器人多样的结构变化,也可实现具有不同材料性质的多功能模块的组装,旨在提高小尺度软体机器人的多功能性和应用前景。研究成果以“Untethered small-scale magnetic soft robot with programmable magnetization and integrated multifunctional modules”为题刊登于国际学术期刊《Science Advances》。论文第一作者为香港中文大学博士后董悦博士。
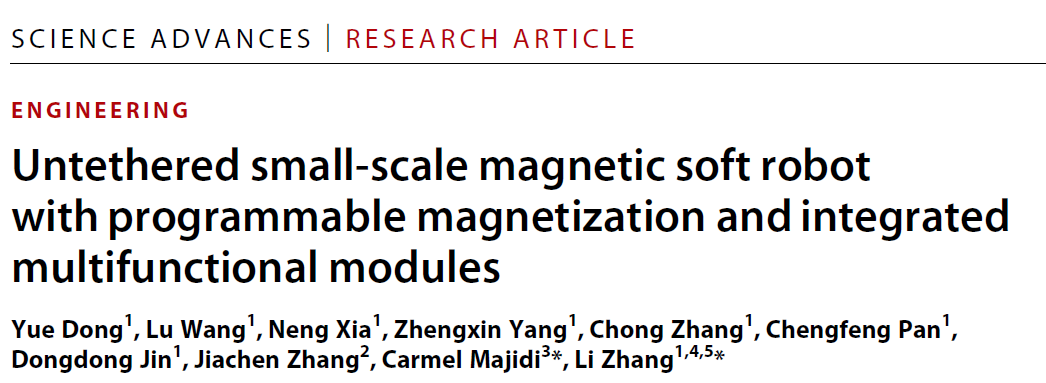
如图1所示,该研究利用双面胶带上不干胶优异的粘附性能,首先实现了钕铁硼颗粒组成的磁化模块(连续磁化和非连续磁化)在软体机器人平面结构的特定部位的组装,之后通过机械切割去除多余的双面胶带就得到了软体机器人。在磁场刺激下,软体机器人表现出了灵巧的结构变化。在软体机器人上未被磁化模块占有的位置,仍然具有不干胶的粘性,这样其它功能模块(温度感应模块,紫外感应模块,pH响应模块,吸油模块,定位模块和导电模块)就可以在不干胶的作用下实现无缝整合。组装的多功能软体机器人在环境感知与监测、电路修复和胃溃疡治疗等领域具有潜在的应用前景。



近五年来,张立教授课题组在磁驱动小型机器人领域发表了超过一百篇学术论文,实现了从毫米、微米到纳米机器人及其集群行为的研究与应用。部分成果如下:Nature Machine Intelligence, 2022, 4(5): 480-493.;Matter, 2022, 5(1): 77-109.; Adv. Mater., 2022: 2201888.; Adv. Mater. 2022, 2109126; Adv. Funct. Mater., 2022: 2112508.; Sci. Robot., 2021, 6(52): eabd2813.; Sci. Adv., 2021, 7(9): eabe5914.; Adv. Mater., 2021, 33(37): 2100070.; ACS Nano, 2021, 15(3): 5056-5067.; Nat Commun 10, 5631 (2019); Sci. Adv., 2019, 5(1): eaau9650.; Nat Commun 9, 3260 (2018).
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 港中大张立教授课题组联合港理大、港中大医学院《Sci. Adv.》:亚毫米磁控微导管技术用于提升血管内介入可达性和治疗效率 2025-06-23
- 武汉理工戴红莲、涂溶/华山医院陈天午 AFM:韧带修复者的福音 - 一种人工韧带制备的新方法 2024-10-14
- 华科大李亮教授、曹全梁教授团队 Nat. Commun.:微型磁控胶囊机器人实现多模态响应与多功能集成 2024-03-12
- 中科大刘世勇教授、胡进明教授/宾夕法尼亚大学Dennis Discher教授 JACS:化学能与光能驱动刚性聚合物囊泡的可编程机械形变 2026-07-17
