模仿生物体的各类生物感受器是开发智能传感器的重要途径之一。例如,受人体皮肤机械感受器的启发,人工电子皮肤可实现对外界接触、按压、滑移等机械刺激的感知。但触觉传感器只能在物理接触时才具有感知功能,不能对外界非接触信号响应。
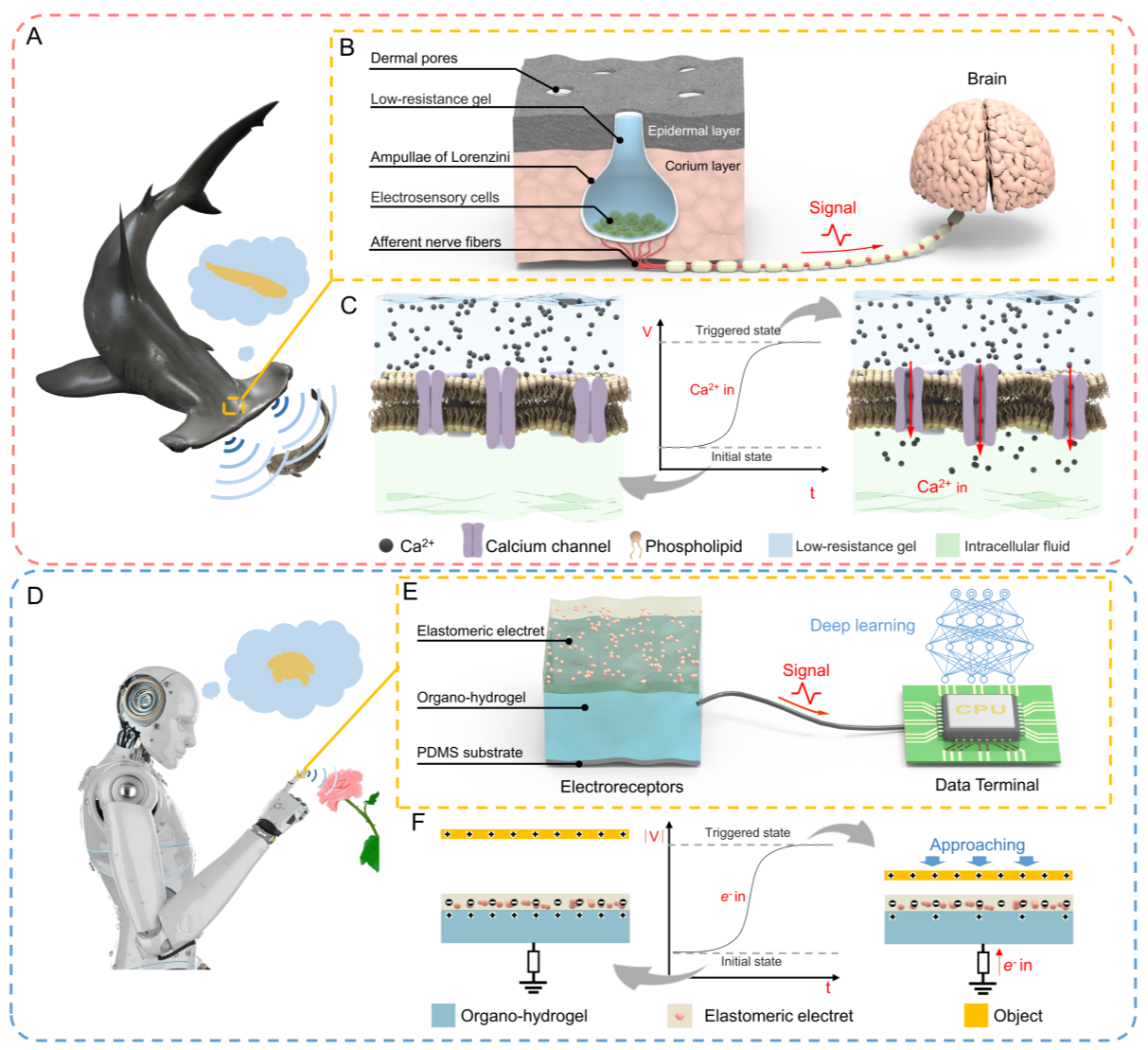
图1. 仿生软体电感受器。(A)分布在鲨鱼头部用于感知环境的电感应系统示意图。(B)鲨鱼电感受器的结构、(C)感知机制。(D)集成在机器人手指上用于目标感知的仿生人工电感受器的示意图。(E)人工电感受器的结构、(F)感知机制。
中科院北京纳米能源与系统研究所王中林院士、蒲雄研究员团队开发了一种仿生软体电感受器,可实现对外界物体的距离传感、三维轮廓识别、及非接触人机交互。一些海洋生物,例如鲨鱼或鳐鱼等,可以利用分布于皮肤上的一种名为电感受器的器官来感受弱电场,从而在黑暗的深海感知猎物或障碍物的距离、形状等信息,实现类比于“皮肤视觉”的功能(图1A-C)。研究团队受此启发,构建了一种基于软体聚合物材料的人工电感受器,其主要由可拉伸的驻极体层,有机水凝胶电极和PDMS封装层组成。当有带有电荷的外部物体或不带电的导体靠近人工电感受器时,由于静电感应效应,可在外电路负载上产生电压信号,从而实现对靠近物体的感知(图1D-F)。基于该人工电感受器,示意了距离预警机器人、非接触人机交互等应用示范(图2)。进一步地,借助于深度学习算法,验证了电感受器阵列用于识别物体三维轮廓的可行性(图3)。相比于电磁、激光、超声等距离传感器,该人工电感受器具有柔软可拉伸的优势,并且在距离越近时响应更高。这种新型的人工电感受器在可穿戴电子、软体机器人、智能义肢等领域具有应用前景。该工作以“Bioinspired soft electroreceptors for artificial precontact somatosensation”为题发表于《Science Advances》(Science Advances 2022, 8, eabo5201)。论文第一作者为北京纳米能源与系统研究所博士生郭子豪。该研究得到了国家自然科学基金的支持。

图2. 基于电感受器的非接触式人机交互界面。(A)电感受器对外部目标接近的实时输出响应。(B)基于电感受器的距离感知的虚拟距离报警机器人。(C)基于电感受器的智能机器人系统的场景设想。(D、E)当一个人靠近时,集成有电感受器的机械手臂与人挥手和握手。(F)基于四个电感受器单元的非接触柔性键盘示意图。(G)非接触键盘控制游戏人物的移动。(H)在COVID-19大流行期间,非接触键盘应用于防止病毒传播的设想。
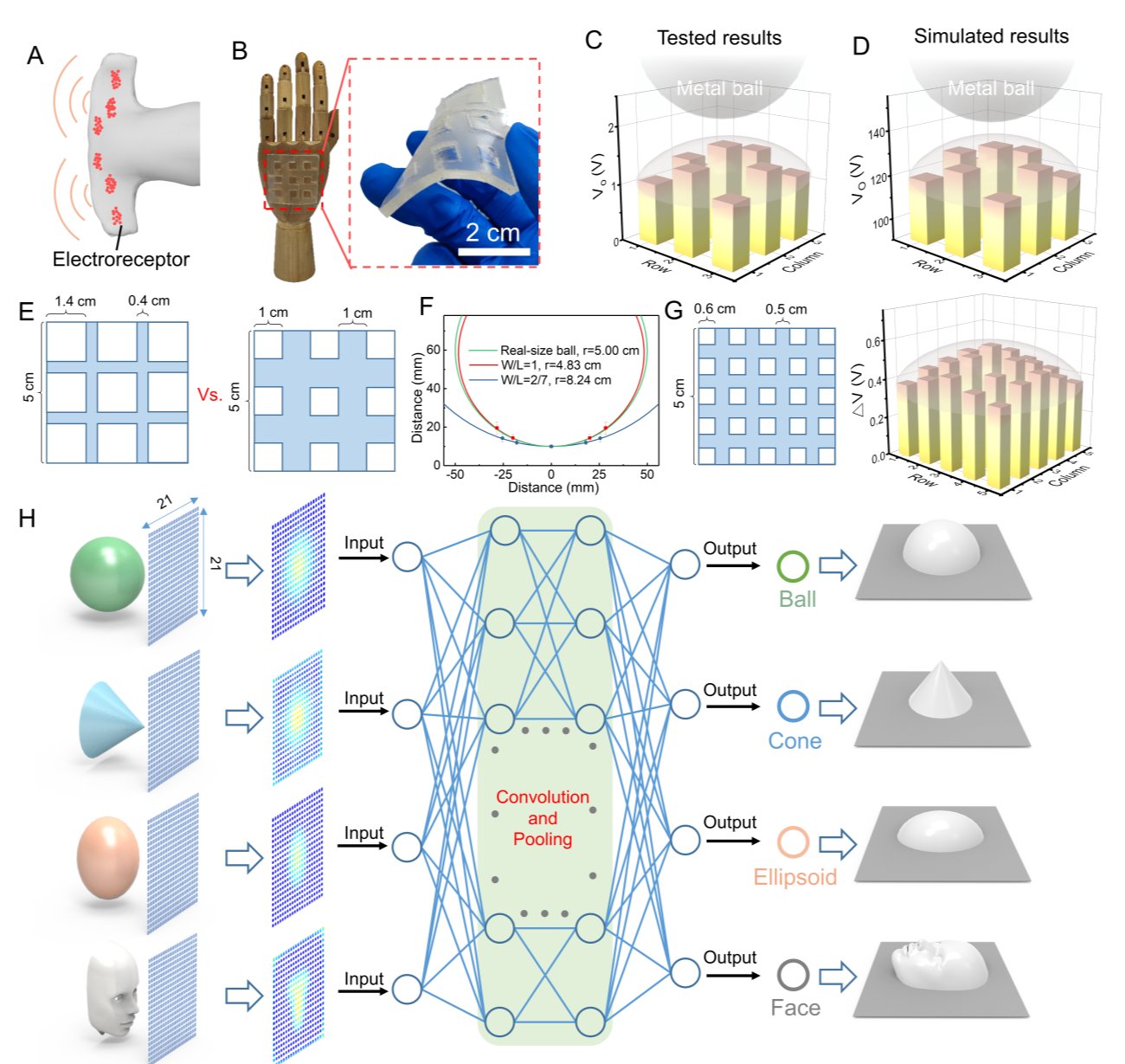
图3. 基于电感受器阵列的仿生非接触体感系统。(A)分布在鲨鱼头部的电感受器网络。(B)3 × 3电感受器阵列的照片。3 × 3电感受器矩阵识别一个金属球轮廓的 (C)实验结果和(D)模拟结果。(E) (F)不同W/L比的电感受器阵列(W/L分别为2/7和1/1)的识别结果比较。(G) 5 × 5电感受器矩阵的结构和金属球靠近时的电压分布,W/L之比= 5/6。(H)基于21 × 21的电感受器阵列和卷积神经网络(CNN)的物体三维轮廓识别体感系统。
该工作是团队近期在软体离子电子器件领域的最新进展之一。软体的离子电子器件利用离子导体电极代替电子导体电极,可实现本征低模量、高弹性的电子器件。研究团队开发了基于水凝胶电极的可拉伸摩擦纳米发电机,实现了高弹性的机电能量转换器件(Sci. Adv. 2017, 3, e1700015);并进一步报道了基于水凝胶-介电聚合物界面动态双电层的机电能量转换机制(ACS Nano 2021, 15, 19651);开发了水凝胶纤维的干湿法纺丝制备方法,实现了凝胶纤维基离子电子器件(Nano Energy 2020, 78, 105389)。针对凝胶电极存在溶剂易挥发、挤压漏夜等问题,设计制备了一种动态交联的固态离子导体,获得了优异的环境稳定性和高的离子电导率,实现了环境稳定的离子皮肤和电致发光器件(Adv. Mater. 2021, 33, 2101396)。
原文链接:
https://www.science.org/doi/full/10.1126/sciadv.abo5201
- 浙江大学柏浩教授团队《Adv. Mater.》:白鲢鱼鳔“以柔克刚”的各向同性抗疲劳机制 2026-07-24
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 成都大学魏竟江/王清远团队 Adv. Mater.:溶剂交换辅助机械训练制备仿肌腱的抗疲劳导电有机水凝胶 2026-05-09
- 燕山大学焦体峰、秦志辉团队 Macromolecules: 盐析效应与原位聚合协同构筑高强韧环境耐受性导电聚合物有机水凝胶 2025-12-13
- 中山大学付俊教授课题组 Chem. Eng. J.:皮肤启发的低迟滞有机水凝胶多维传感器 2024-10-17
- 芝加哥大学王思泓教授团队《Nat. Commun.》:超柔软可拉伸有机电子器件 2023-08-08
