动植物的复杂变形和运动能力对其生存与进化至关重要,为智能变形材料、软机器人的设计开发提供了灵感和范例。水凝胶与生物软组织具有高度相似性、多种智能响应性,是构筑软驱动器和软机器人的理想材料。基于对生物体系工作原理的认识以及水凝胶加工技术的突破,该领域在近十年得到了快速发展。浙江大学郑强、吴子良团队应邀在《Accounts of Chemical Research》上发表了题为“Programmable morphing hydrogels for soft actuators and robots: from structure Designs to Active Functions”的综述论文并被选为封面文章,总结了近年来在水凝胶可控变形与凝胶软体驱动器、软机器人领域的研究进展。

软驱动器、软机器人等器件功能的实现,与高分子软材料可控变形密切相关。通过构筑平面、厚度方向的梯度结构,可以使水凝胶在外界刺激下产生非均一的体积溶胀或收缩,进而产生内部应力,发生弯曲、折叠、扭转、屈曲等模式的可控变形。通过多个单元的叠加,可以形成复杂的三维构型。平面梯度结构引起的面外屈曲变形具有双稳态的特性,为水凝胶实现多稳态构型提供了新的途径。浙大郑强、吴子良团队采用局部预溶胀的方法调控多个单元的屈曲方向,使同一水凝胶在相同条件下获得了多种不同的构型。在含有周期性平面梯度结构的水凝胶中,相邻单元的屈曲变形相互影响,呈现协同效应,从而自发形成周期性起伏的构型。

图1. 生物组织的可控变形及运动功能。
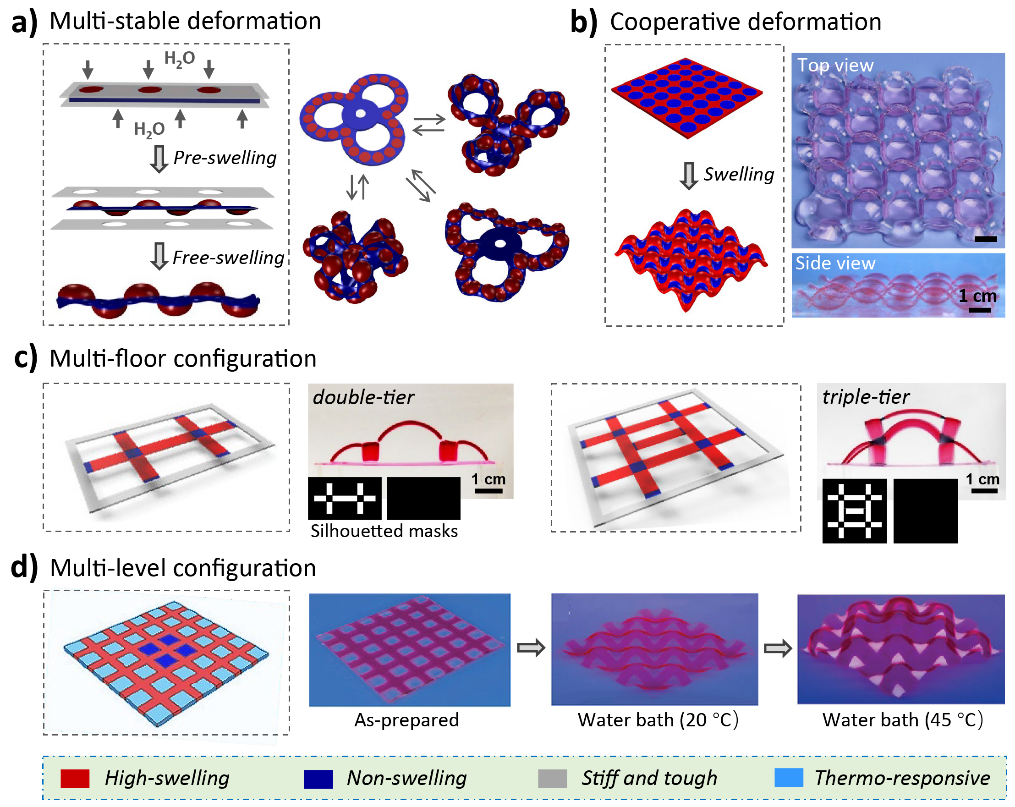
图2. 含有平面梯度结构的水凝胶的协同变形与多稳态变形。
可变形水凝胶广泛应用于医疗器械、软驱动器等领域。然而,由于水凝胶力学性能较差,驱动器的输出力比较有限,并且驱动速度较慢。该团队通过3D打印高强水凝胶,制备了兼具输出力大和响应快速的软驱动器;设计了高强度水凝胶管状抓取器,可牢固抓取不同形状的物体。已有的水凝胶驱动器大多通过弯曲变形实现功能,已发展的其他变形模式为软驱动器的设计与应用提供了空间。
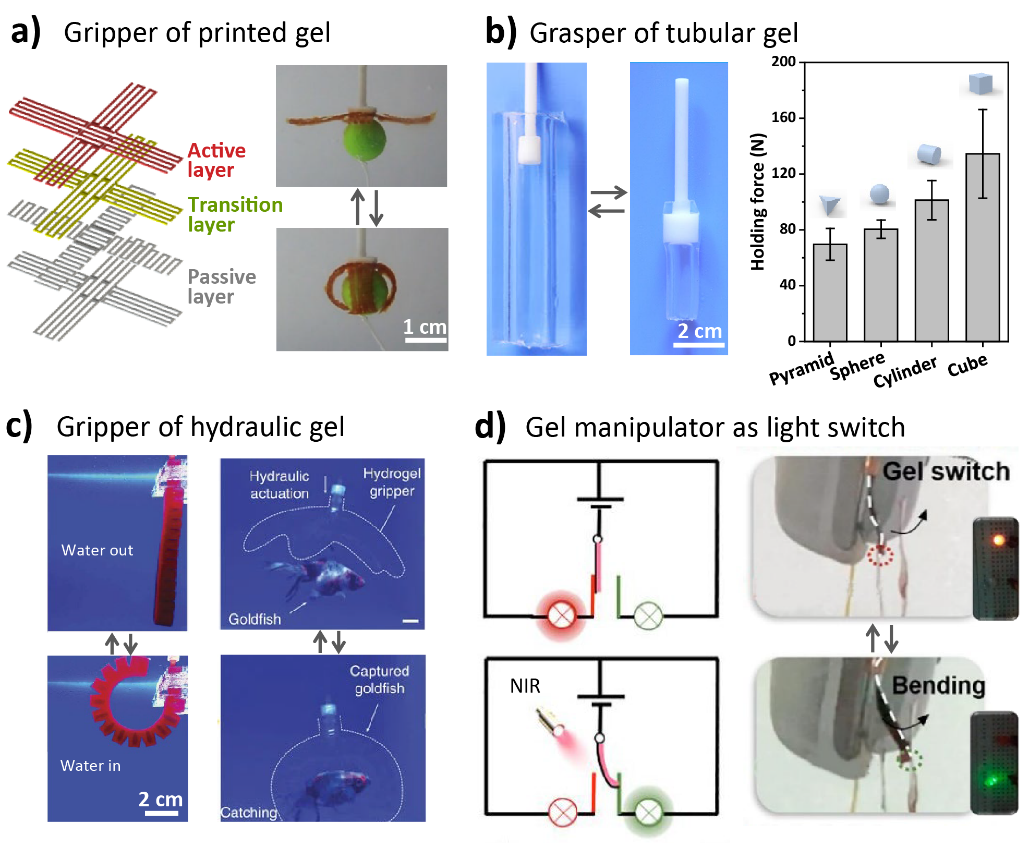
图3.水凝胶软驱动器。
可变形水凝胶是设计具有运动功能的软机器人的理想体系,其难点在于如何将水凝胶的可逆弯曲、伸缩变形转化为连续、定向运动。采用周期性环境刺激、使用棘板控制单向运动、设计非对称几何结构是实现水凝胶定向运动的常用策略,但运动方向单一,无法实现反向运动。该团队采用动态光驱动水凝胶局部变形并同步调节与基板的摩擦力,实现了爬行、转向、蠕动等运动过程及方向的动态调控。

图4.可“行走”的水凝胶的软体机器人。
可变形水凝胶在生物医学、柔性电子等领域也展现出了巨大的应用潜力。但是,水凝胶体系与生物体的智能性相比仍存在巨大差距。此外,其应用领域仍需进一步拓展,还须考虑安全性、稳定性等问题。
该文章发表于Accounts of Chemical Research,该工作得到了国家自然科学基金委的资助。
文章信息:
Dejin Jiao, Qing Li Zhu, Chen Yu Li, Qiang Zheng, Zi Liang Wu, Programmable Morphing Hydrogels for Soft Actuators and Robots: From Structure Designs to Active Functions, Acc. Chem. Res. 2022, DOI: 10.1021/acs.accounts.2c00046.
https://pubs.acs.org/doi/10.1021/acs.accounts.2c00046
- 北师大汪辉亮教授团队:金属离子配位构筑高强度和可变形水凝胶 2020-09-22
- 宁波大学翁更生教授课题组 Chem. Mater.:受生物形态发生启发的聚合物薄膜3D可控变形 2024-04-11
- 浙江大学郑强、吴子良团队 Angew:旋转磁场辅助制备具有多响应性、复杂取向结构的纳米复合水凝胶 2022-06-27
- 浙江大学郑强、吴子良团队Adv. Sci.:图案化电场辅助的复杂取向结构构筑及水凝胶可控变形 2021-10-29
- 长春工大刘鑫、张钦课题组 Angew:一种兼具高机械强度与高锌离子迁移率的可回收超分子水凝胶电解质用于稳定锌负极 2026-07-13
- 浙江大学赵骞教授、浙江省肿瘤医院张宇华团队 Adv. Mater.:在可编程的自发变形水凝胶方面取得进展 2026-07-12
- 天工大张松楠 AFM 综述:水凝胶为光伏板“退烧” - 开启水-能协同热管理新路径 2026-07-10
