UCLA裴启兵/四川大学杨伟 Sci. Adv.:用人工肌肉制备高速线性马达
2022-03-07 来源:高分子科技
介电弹性体致动器(DEA)是开发软体机器人、可穿戴设备、柔性医疗器械和触觉反馈界面等硬件的基础元件。传统DEA基于静电力挤压的驱动形式,仅能产生微弱的面外应变输出,虽然研究者开发出了将DEA与限制层粘附和堆叠黏合多层DEA等方法来提高面外输出能力,但又往往带来粘接面缺陷、界面分层和低良率等问题。
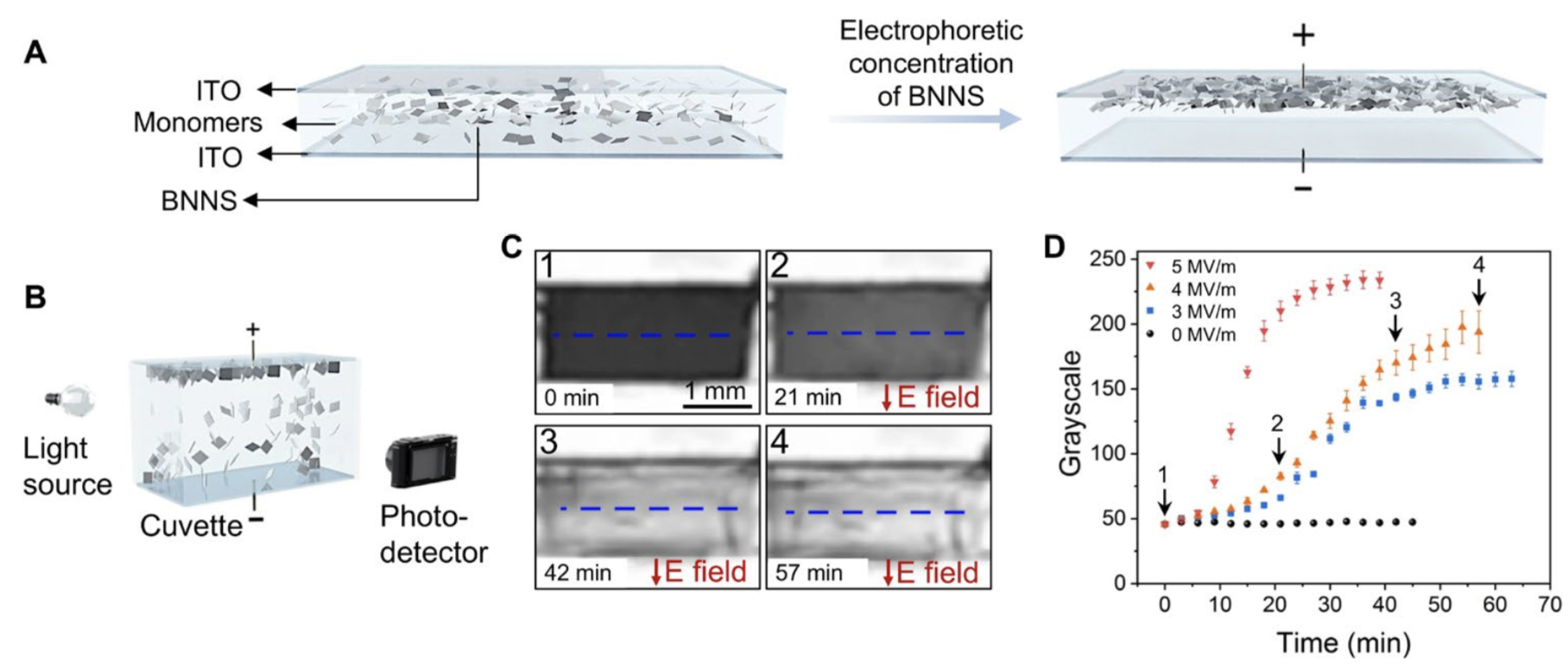
图1. 电泳聚集法制备UNDE薄膜的过程示意图
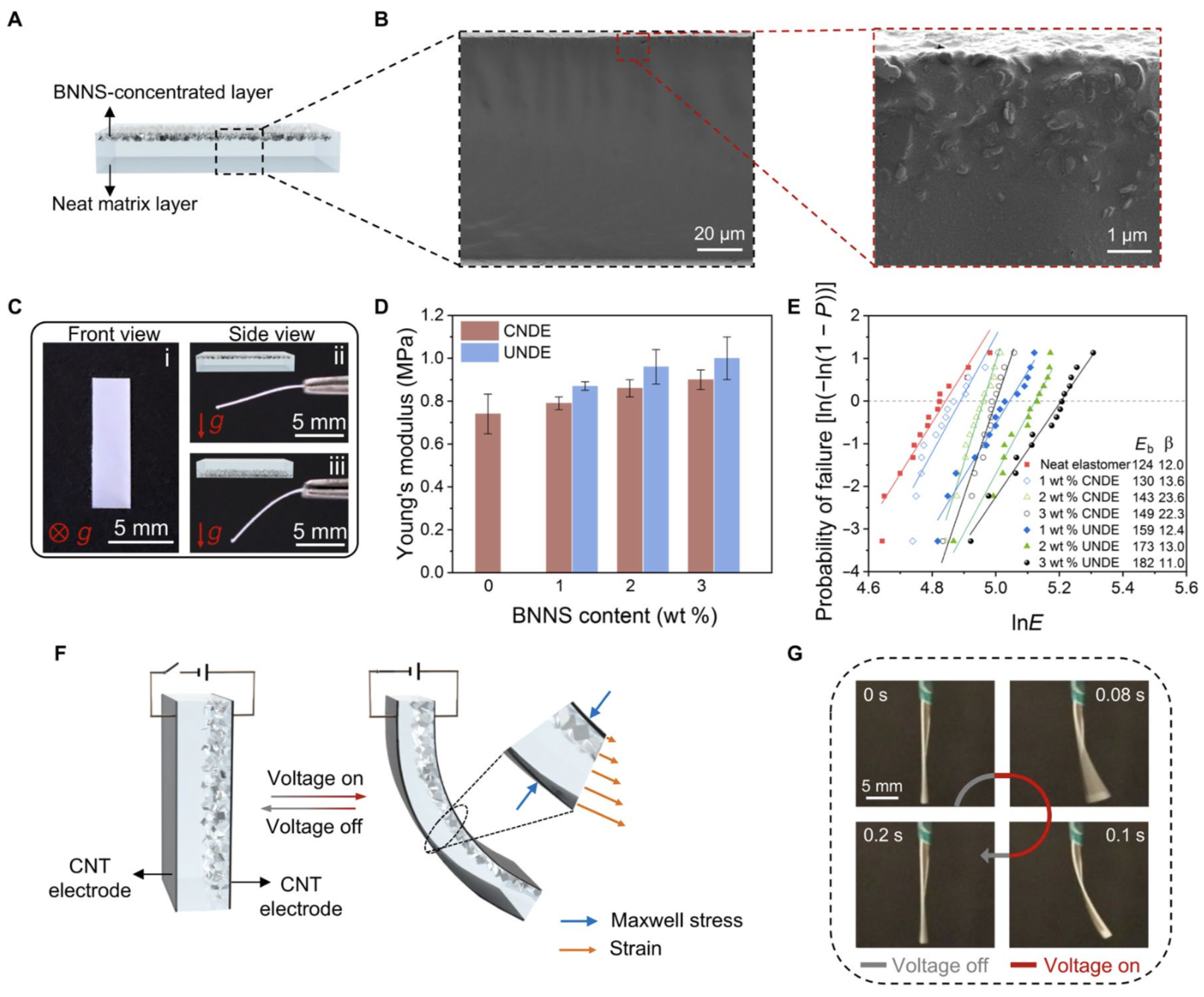
图2. UNDE薄膜的结构表征和驱动机理
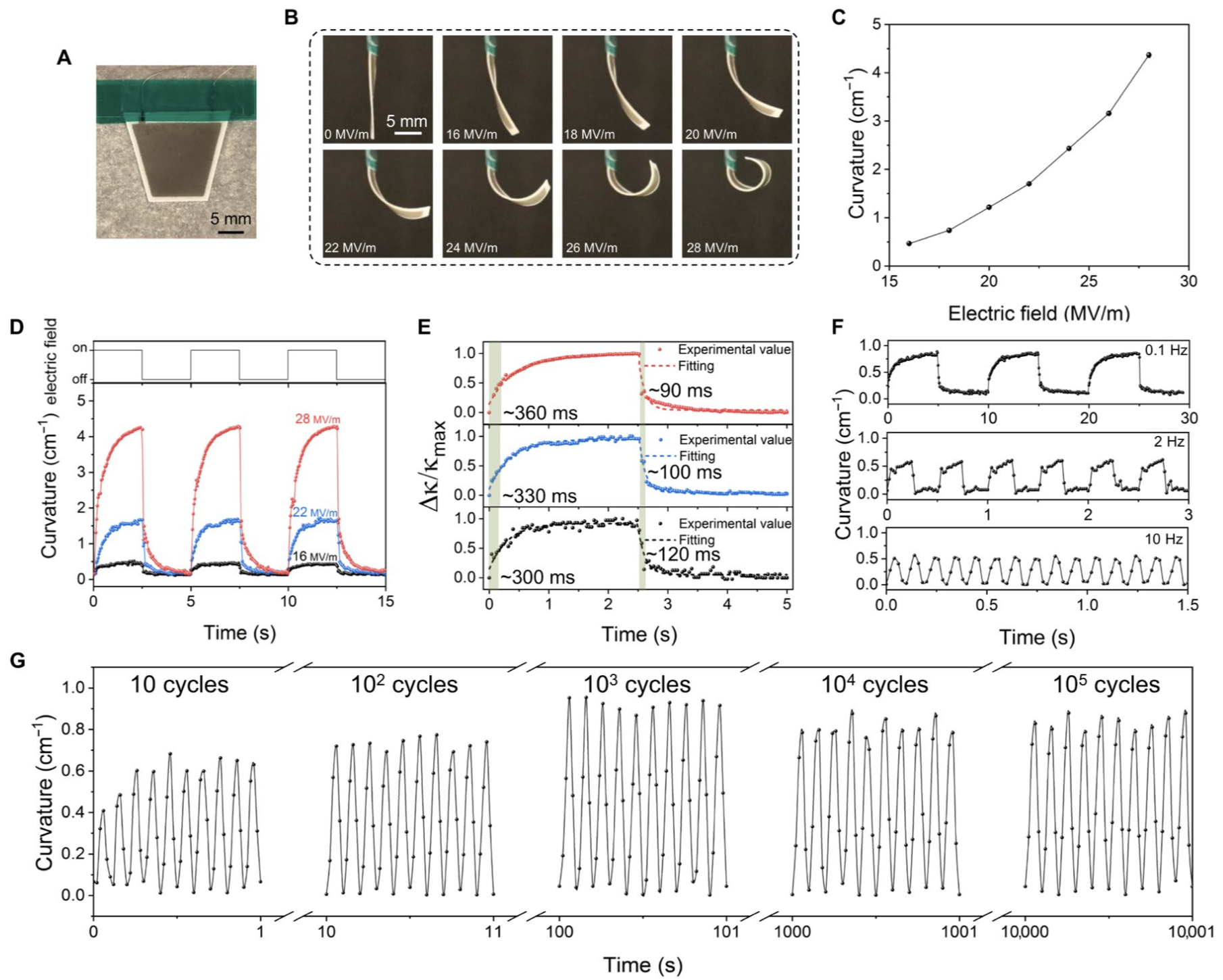
图3. 3wt%UNDE致动器的弯曲致动性能

图4. 圆盘形线性DEA的结构及其驱动性能
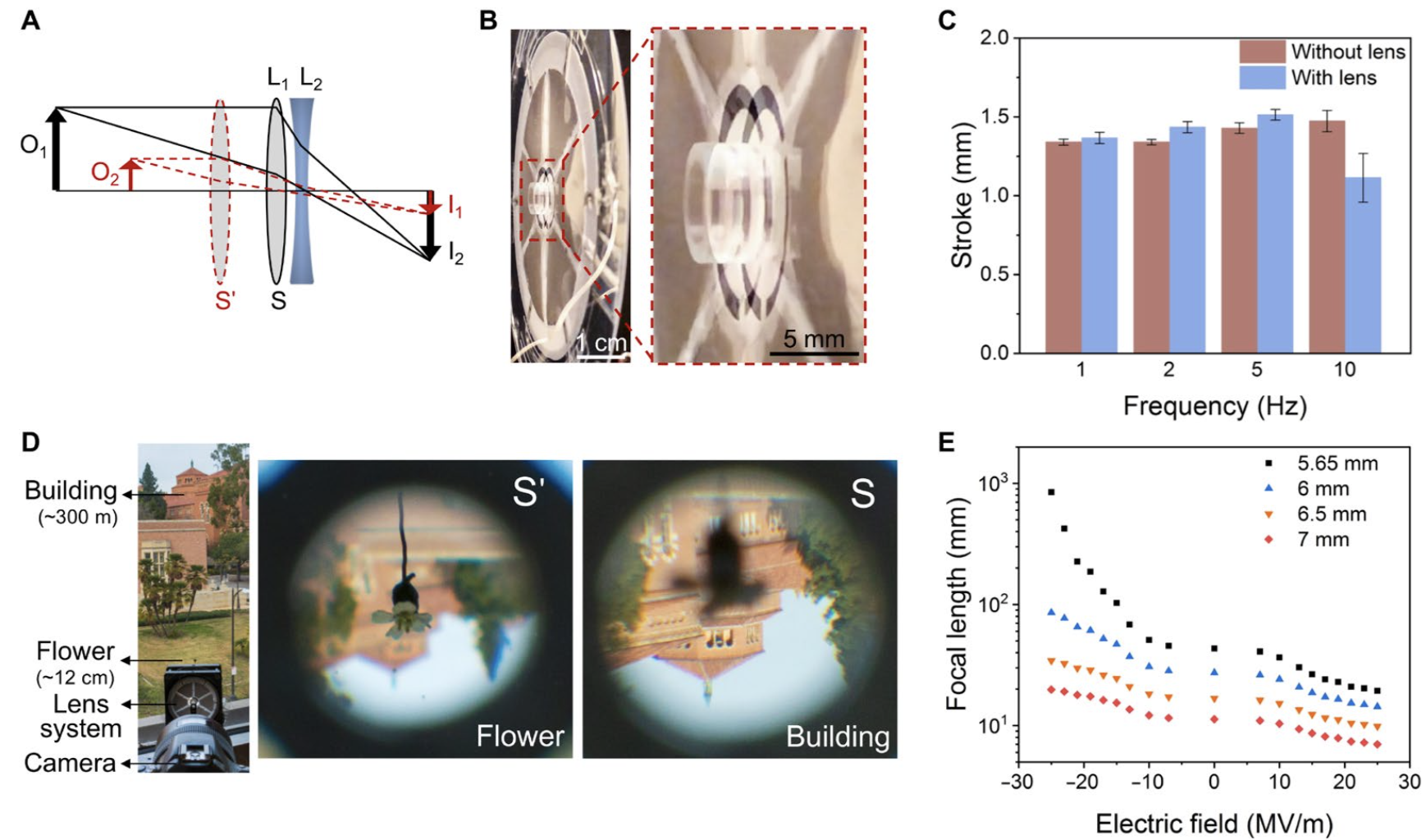
图5. 由圆盘形线性DEA作为镜头马达驱动的光学变焦系统
该工作是裴启兵教授团队和杨伟教授团队合作在介电弹性体复合材料制备人工肌肉领域取得的最新进展之一。以聚合物分子链和功能粒子为对象,合成分子链网络结构和开发功能粒子分布调控方法,从化学和物理结构上设计制备出高性能弹性体材料。基于此,裴启兵教授团队报道了采用预拉伸(Science, 2000, 287, 836–839)、引入聚合物双网络结构(Adv. Mater. 2006, 18, 887–891)、调控聚合物交联度(J. Polym. Sci. B, 2013, 51, 197–206)和制备柔性复合材料电极(Adv. Funct. Mater. 2021, 2008321)等方式实现DEA大幅度应变稳定输出。杨伟教授团队基于大分子与功能粒子的相互作用,开发出基于熔体剪切流场诱导(Nanoscale, 2018, 10, 2191;Adv. Mater. Interfaces, 2018, 5, 1700946)和冰模板辅助生长(Prog. Polym. Sci., 2020, 109: 101289.)等加工方法以实现纳米粒子的可控分布和网络构筑,制备出高灵敏度宽检测范围的应变传感材料(Mater Horiz, 2020,7, 2450; Nano Energy, 2020, 104814)、高性能的热管理材料(Mater Horiz, 2019, 6, 250; Chem. Eng. J, 2020, 392, 123784; 2021, 425, 131466)及高性能电池电池电极(Adv. Funct. Mater. 2021, 31, 2008652;Energy Storage Mater. 2021, 40, 415)。
原文链接:https://www.science.org/doi/10.1126/sciadv.abm6200
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 北京化工大学杨丹教授 Nano Energy:基于强界面结合力的自供电整体自愈合介电弹性体致动器 2025-04-22
- 清华大学党智敏教授团队《Nat. Commun.》:共振频率可以达到200 Hz的丙烯酸酯弹性体 2024-11-19
- 南京大学徐飞教授 AFM:具有高环境稳定性的眼压监测智能隐形眼镜 2024-04-17
- 中科院化学所赵彤研究员课题组 AFM:基于液晶工程的双有序策略制备兼具高强度与高导热性能的邻苯二甲腈纳米复合材料 2026-05-21
- 俞书宏/何振团队 Nat. Commun.: 牙釉质启发兼具高力学和自修复性能的仿生纳米复合材料 2026-05-19
- 南理工傅佳骏教授团队 AM:强韧如贝壳 - 兼具耐湿、室温自修复与高导热性能的仿生纳米复合材料 2025-10-06
- 东华大学张青红教授等 AFM:基于高强导电同轴MXene纤维的多响应人工肌肉 2026-06-15
