微型软体机器人可以主动改变自身的形状以实现更加灵活的运动和操作,因而十分擅长在小尺寸且空间受限的环境中工作,这一独特的优势将使得他们被广泛地运用在生物医学领域。磁驱动是目前控制软体机器人最流行的方法之一,因为磁驱动具备可以远程无线控制、响应快速且易于实现的优势。然而由于制造技术受限,目前大多数磁性软体机器人是由翻模铸造,通常需要繁琐及耗时的制作步骤且局限于2D结构,因而功能简单且单一。
3D打印技术为打破这种局限提供了可能。立体光固化3D打印技术(Vat Photopolyerization,简称VP)具有高精度、高分辨率、快速成型等优点。通过立体光固化技术,3D打印添加了磁性颗粒填料的弹性树脂,可以实现微型磁性软体机器人的快速整体成型。然而在普通的立体光固化平台上,如果使用纳米尺度的磁性颗粒填料,磁性颗粒会对树脂基质的光吸收造成很大的干扰。如果使用粒径较大的微米尺度磁性颗粒填料,虽然对光吸收干扰较小,但是磁性颗粒会快速沉降到容器底部,这将导致磁性填料在打印部件中的分布不均匀,甚至导致打印无法完成。因此,大多数前期研究只使用纳米磁性颗粒作为磁性填料,同时保持较低的载量(<1%) 来确保磁性复合材料能够成型,然而此类材料打印的微型机器人不能产生大的磁力用以驱动微型结构的形变,这些机器人大多只能实现刚性移动,通常也需要在液体环境中,利用液体的润滑特性与浮力来减少运动的阻力。

图1:循环立体光固化(CVP)3D打印技术:a) 树脂循环系统示意图;b) 普通循环立体光固化(VP)与CVP打印的样品对比,Bottom代表这部分首先打印,Top代表这部分最后打印;iii & iv 分别是i & ii 中虚线部分的横截面;c) b 中样品不同部位的密度对比;d) b中样品Bottom 和 Top 部位中铁元素(Fe)和锶元素(Sr)的分布对比。

图2:CVP的特性分析: a) 相近尺寸的锶铁氧体(SrFe12O19)、氧化铁(Fe3O4)和铷铁硼(NdFeB)颗粒的吸收光谱;b)不同尺寸锶铁氧体(SrFe12O19)颗粒的吸收光谱;c)不同尺寸锶铁氧体(SrFe12O19)颗粒在树脂中的下降速率;d)复合树脂在不同剪切速率下的粘度;e)600~900 s-1的平均剪切速率;f)不同磁性颗粒含量样品(CVP)的应力应变图;g)不同磁性颗粒含量样品(CVP)的杨氏模量;h)不同磁性颗粒含量样品(CVP)的磁滞回线;i-k) CVP打印的微型结构;k) 磁性弹簧的线径为300微米,外径为900微米。
微型磁性软体机械爪的爪子部分与基座为悬臂梁结构(图3a),当磁铁靠近机械爪底部的时候,爪子被拉向靠近磁铁,此时爪子张开;当磁铁被移走时,爪子自身的弹性将使爪子复位,此时爪子处于关闭状态。传统的机械爪是用来抓取固体物品,然而当本文的机械爪表面覆盖上一层超疏水涂层时,机械爪不仅可以用来抓取固体物品(图3d),更重要的是可以用来抓取液滴(图3b)。此外,该机械爪还可以用来融合liquid marble. Liquid marble 是在液滴的表面覆盖了一层由超疏水颗粒形成的膜,由于这层膜的存在,使得liquid marble之间的融合非常困难。目前的做法是将两个liquid marble以一定的角度高速碰撞,这种方法非常不容易控制,liquid marble经常互相弹开;另一种方法是使用高压,利用电荷的相互吸引促使liquid marble的融合,但是这需要上千伏的电压,容易引起安全事故。本文的机械爪可以同时抓起两个liquid marble,通过挤压的方式将其融合(图3c),非常的简单高效。该机械爪的最大开合角度为35°,开合速度为8.4°/s,每个爪子可以提供约4.7mN的力,可以抓起3~50微升的液滴和0.958g的固体物品,并在1万次开合后仍能正常工作。
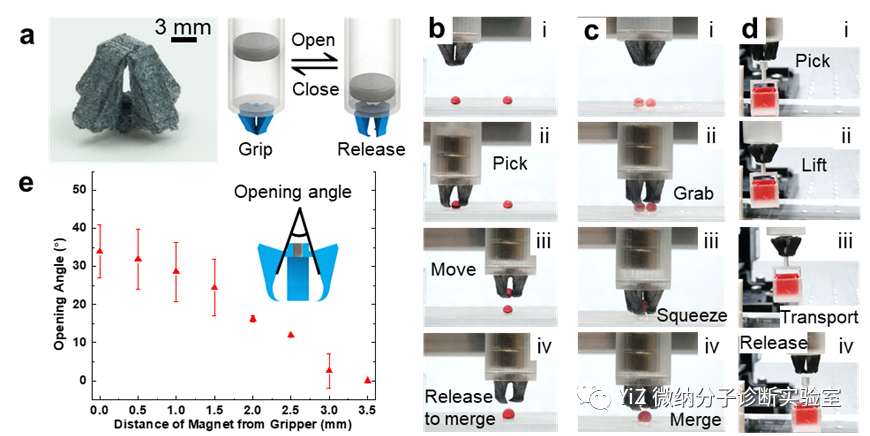
图3:磁性软体机械爪:a)机械爪的工作原理;b)机械爪抓取并移动液滴;c)机械爪同时抓起两个marble,通过挤压使之融合;d)机械爪抓取普通的物体。

图4:非栓系磁性微型机器人:a)毛毛虫机器人 ;b)木马机器人;c)毛毛虫机器人的运动原理;d)毛毛虫机器人推动一个液滴;e) 毛毛虫机器人将一个液滴射向另一个液滴,使之融合;f) 木马机器人同时推动两个液滴;g)毛毛虫机器人的步幅;h)木马机器人的步幅;i)水母机器人以及它的磁化方向;j) 水母机器人在水里向上游动。

图5:水下磁性微型机器人:a)螺旋机器人的磁化方向以及其沿着方形路径的移动;b) 小鱼机器人的磁化方向以及其沿着Z路径的移动。
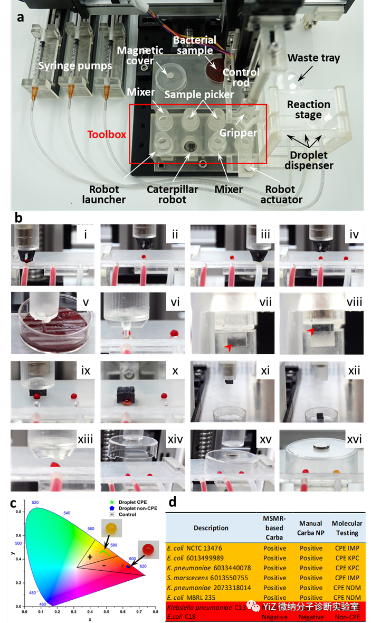
图6:可进行体外诊断的磁性微型软体机器人自动化控制平台:a)自动化控制平台示意图;b)在平台上对碳青霉烯类抗生素耐药性进行检测的操作程序:i-ii:放置反应缓冲液滴;iii-iv:放置样品缓冲液滴;v:从培养基上提取细菌;vi:将细菌放入样品缓冲液的液滴中;vii-ix:放置毛毛虫机器人于反应平台上的适当位置;x:毛毛虫机器人在磁场的驱动下推动液滴进行融合;xi-xii:使用过的毛毛虫机器人被丢弃在指定位置;xiii:在液滴内部进行搅拌,保证液滴的充分融合;xiv-xv: 盖子罩住液滴;xvi:充分反应1小时后;c)检测的结果映射到CIE 1931色彩空间,有耐药性的细菌在+区域,没有耐药性的细菌在-区域;d)8种细菌的检测结果与传统方法得到的结果对比。
原文链接:
Magnetic Soft Millirobots 3D Printed by Circulating Vat Photopolymerization to Manipulate Droplets Containing Hazardous Agents for In Vitro Diagnostics
Aiwu Zhou,Changyu Xu,Pojchanun Kanitthamniyom,Chelsea Shan Xian Ng,Gerard Joseph Lim,Wen Siang Lew,Shawn Vasoo,Xiaosheng Zhang,Guo Zhan Lum,Yi Zhang
Advanced Materials
https://onlinelibrary.wiley.com/doi/10.1002/adma.202200061
下载:Magnetic Soft Millirobots 3D Printed by Circulating Vat Photopolymerization to Manipulate Droplets Containing Hazardous Agents for In Vitro Diagnostics
- 哈工大(深圳)马星/金东东团队 Nat. Commun.:通过反应润湿制备用于小尺度软体机器人的液态金属/四氧化三铁磁性复合材料 2023-10-09
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 中国科大胡衍雷教授、吴东教授团队 Nat. Commun.:实现飞秒激光制造用于多样化液滴操纵的磁响应“双面神折纸”机器人 2023-09-09
- 湖南大学王兆龙课题组《ACS AMI》:3D打印制备仿生超疏水微结构用于微液滴操纵 2020-12-30
- 西安交大研究人员发现新的浸润现象,将在油水分离、液滴操纵等领域有重要应用 2017-06-07
