磁场驱动的微型软体机器人因其可编程变形和远程遥控的快速驱动特性,在生物医学领域具有广阔的应用前景。2018年,德国马普所Metin Sitti和麻省理工学院赵选贺团队分别独立提出了基于硬磁软材料的软体机器人(Nature 554,Nature 558),引起了广泛关注。然而,硬磁软材料的研究尚处于初步阶段,仍存在诸多挑战:磁畴编辑困难,调控手段较少;力学结构失之简单,限制了其变形能力。
近日,西安交通大学唐敬达副教授和华中科技大学邓谦副教授研究团队在Wiley旗下智能系统领域期刊Advanced Intelligent Systems发表题为“Magnetic Arthropod Millirobots Fabricated by 3D-Printed Hydrogels” 的文章。作者将3D打印与“模板辅助磁化”相结合,在保留复杂结构的同时,克服了原位磁畴编辑的困难。进一步为磁性软机器设计了类似节肢动物“关节”的结构,实现了“关节”部位非均匀弯曲刚度的调控,使其可以在较小磁场的驱动下达到更佳的变形效果,以此设计了众多变形结构。作者展示了在影像手段辅助下,利用磁场遥控水凝胶机器人从猪的不同器官中定位、抓取和移动外来异物,阐明了磁性软机器作为微型手术机器人的应用前景。
1、磁性变形结构的设计、材料合成

图1 节肢动物启发的磁性软体机器人的设计和制造
作者通过掺杂硬磁性颗粒(NdFeB)的3D打印磁性水凝胶制造磁性软体机器人,硬磁颗粒可进行磁畴编辑,使材料在外加磁场下产生可编程复杂变形。仿生“关节”设计将软机器中常见的弯曲变形(材料整体发生变形)转化为折叠变形(主体围绕关节转动),使相同磁场下的变形角度增大,同时降低了能量消耗(图1)。

图2 含微球的硬磁性水凝胶的合成
材料合成详见J. Mater. Chem. B, 2021, DOI: 10.1039/D1TB01694F(https://pubs.rsc.org/en/content/articlelanding/2021/TB/D1TB01694F)。该硬磁性水凝胶添加了水凝胶微球,同时起到双网络增韧、增稠和3D打印的效果,确保了硬磁颗粒在水凝胶基体中的均匀分布及磁畴编辑(图2)。
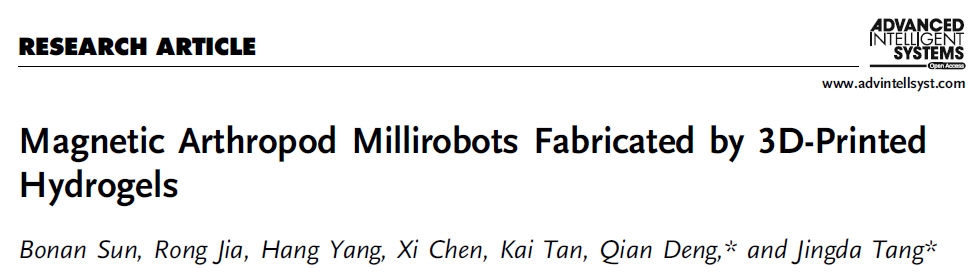
作者研究了磁性软机器的基本力学结构(悬臂梁)在磁场下的变形行为(图3),并通过实验和数值仿真对比了弯曲和折叠两种变形模式,发现同样磁场下,折叠模式的变形角度更大,证明了关节设计的有效性,探究了折痕几何参数的影响,为此后的机器人结构设计提供了理论依据。
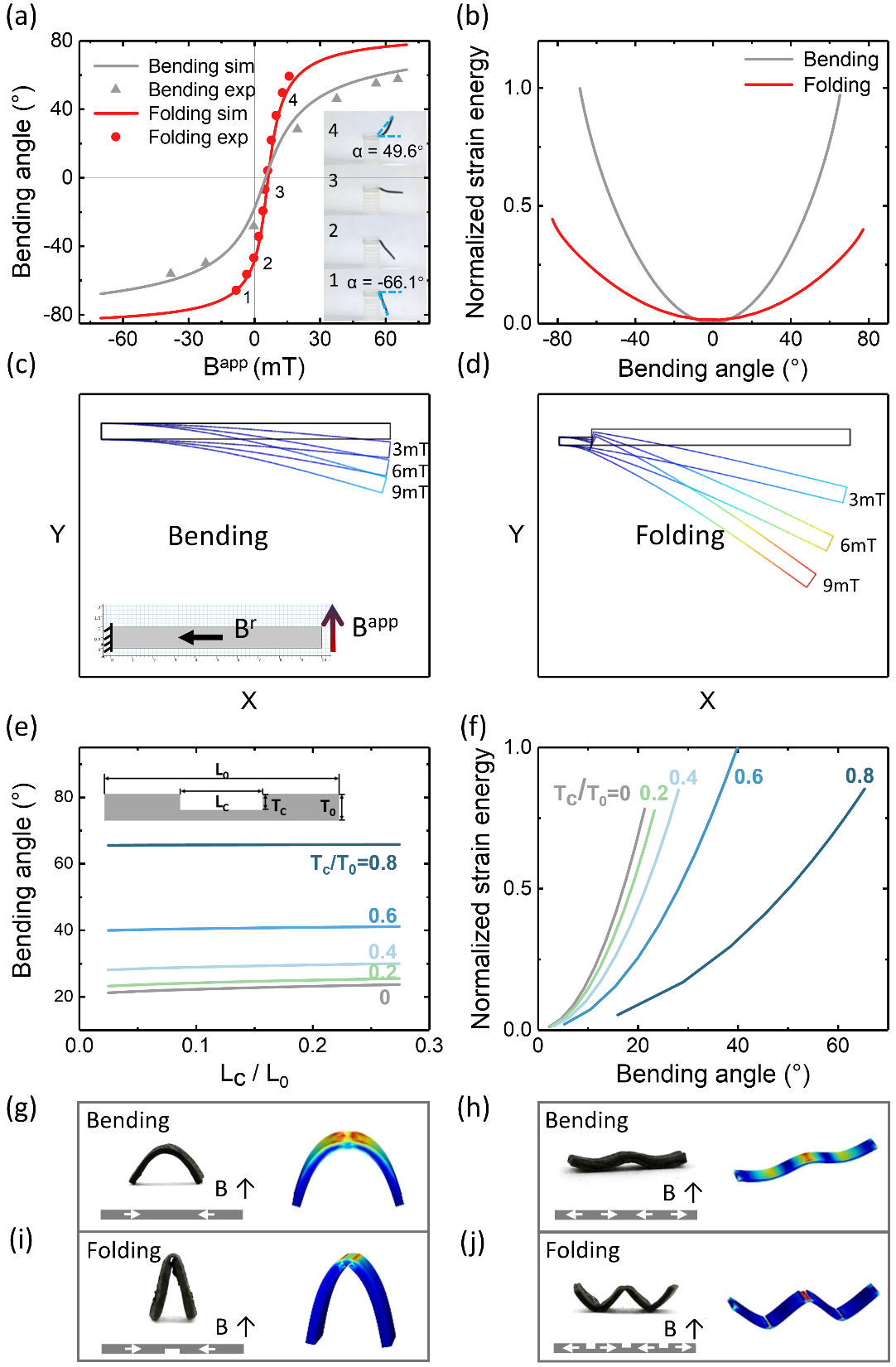
图3 磁性软体机器人的基本结构单元变形研究
2、磁性软体机器人的驱动变形和应用展示
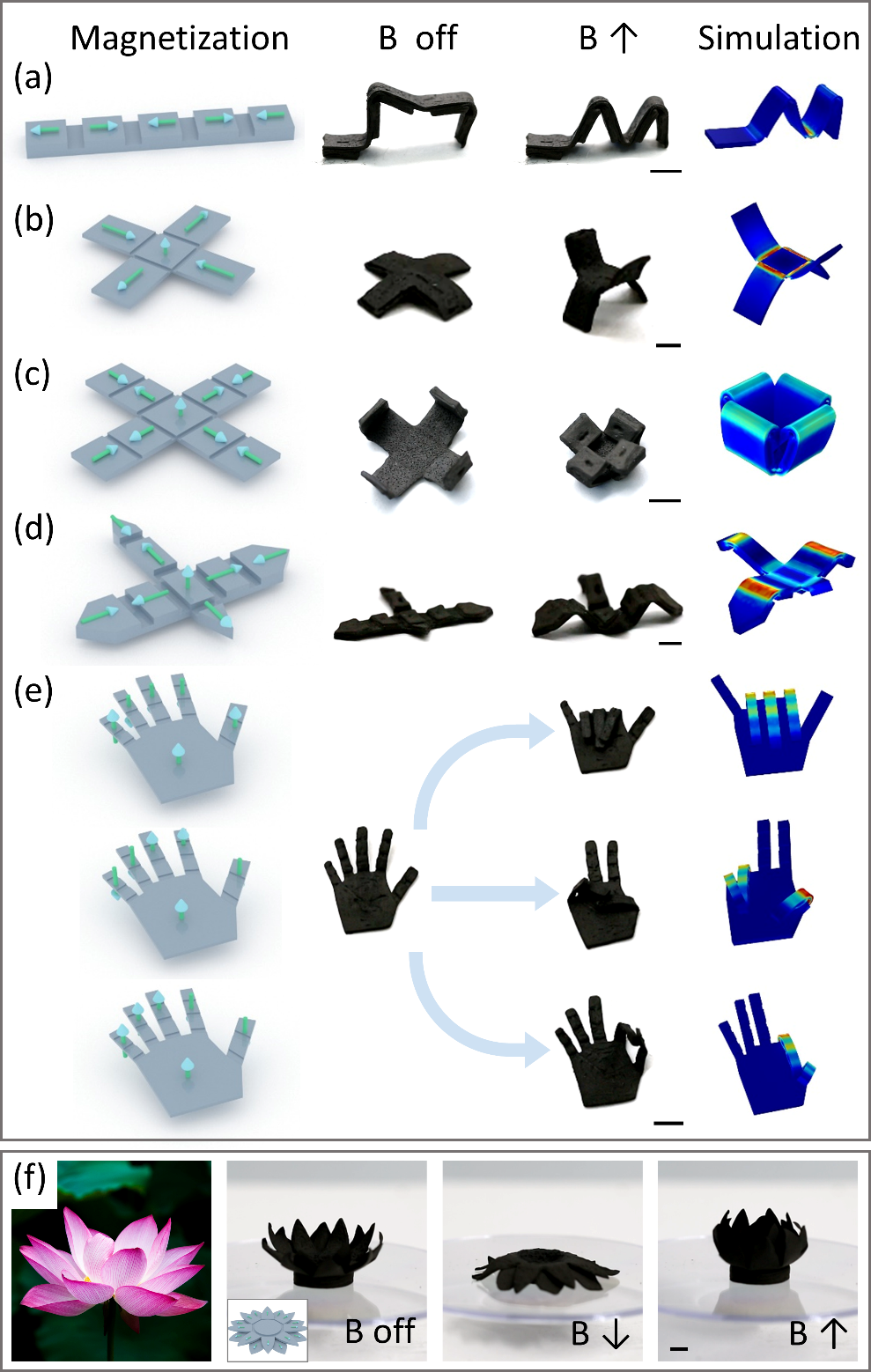
图4 含折痕的磁性变形结构
作者实现了多种磁性变形结构在磁场驱动下的快速、可重复变形驱动(图4),并且用有限元仿真软件预测了软机器的变形。进一步设计制造了一种六臂机器人,具有多种不同的形态(平铺、站立、收拢),可在磁场控制下于不同形态之间转变(图5),响应速度极快(1秒以内),该软机器的大小和指甲盖相当(~10mm)。
图5 磁场驱动下具有多种运动模式的六臂软体机器人
利用上述六臂机器人,作者展示了磁性软机器的一项潜在应用(图6):预先将一件异物(铅丝)放进动物的器官中(主动脉、胃和大肠),在内窥镜影像的辅助下,六臂机器人先是由磁场遥控在器官中移动并且定位目标,随后利用变形能力完成对目标物体的捕获,最后在磁场的导航下携带物体前往指定地点。得益于硬磁性材料对外加磁场的快速响应,整个实验过程可以在几分钟之内完成,而且磁性水凝胶具有较低的细胞毒性。
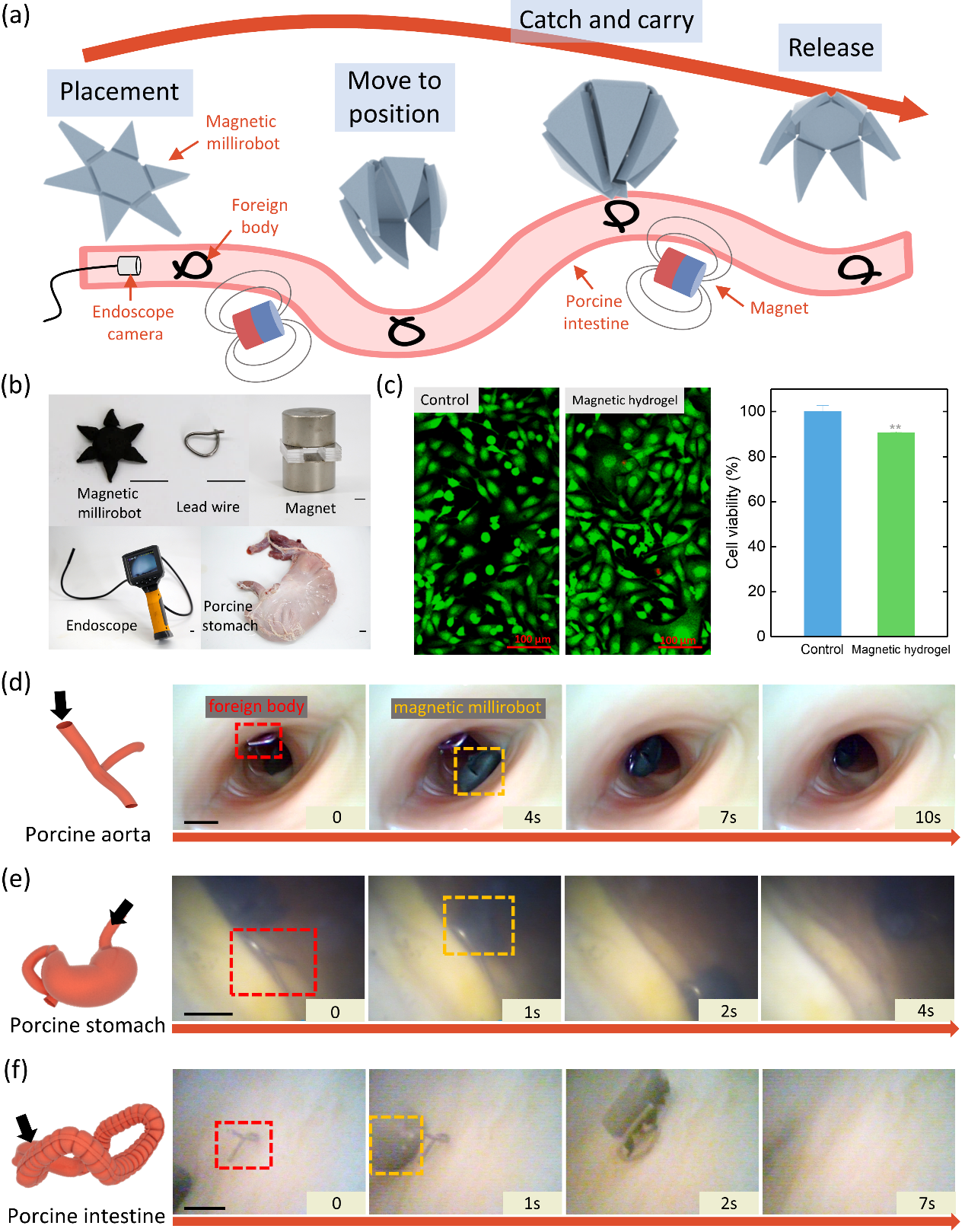
图6 磁性软机器人用于管腔中的异物抓取
论文共同第一作者是西安交通大学航天航空学院硕士研究生孙伯男和贾荣,通讯作者是西安交通大学唐敬达副教授和华中科技大学邓谦副教授。 西安交通大学机械结构强度与振动国家重点实验室为第一单位,上述研究得到了国家自然科学基金重点国际(地区)合作研究项目、科技部重点研发计划政府间创新合作项目、面上项目、青年项目的资助。
论文链接:Bonan Sun, Rong Jia, Hang Yang, Xi Chen, Kai Tan, Qian Deng, Jingda Tang, Magnetic Arthropod Millirobots Fabricated by 3D-Printed Hydrogels. Advanced Intelligent Systems, 2021, 2100139.
https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202100139
作者简介:
唐敬达,西安交通大学副教授,北京大学与哈佛大学联合培养博士(导师方岱宁院士和锁志刚院士),2017年进入西安交通大学航天航空学院工作,在软物质力学领域开展研究。发表论文30余篇,其中以第一/通讯作者发表在Matter,
J. Mech. Phys. Solids, Adv. Funct. Mater., ACS Appl. Mater. Interfaces等期刊上。
邓谦,华中科技大学副教授,美国佛罗里达大学机械与航空工程系博士。2015年至2021年2月,在西安交通大学航天航空学院担任副教授。2021年3月进入华中科技大学航空航天学院工作,主要研究方向是固体力学和智能材料。在PRL, J. Mech. Phys. Solids, Materials Today等国际学术期刊上发表SCI论文30余篇。
- 中国科大李家文教授团队 ACS Nano:3D打印源自单组分前驱体树脂的超高强度、超高韧性微纳SiOC陶瓷 2026-07-09
- 西工大黄维团队官操教授 AM:数字化制备三维液态金属水凝胶 2026-05-28
- 中国科大/伍伦贡大学 AFM 封面:基于面投影光固化技术的仿生梯度抗冲击结构材料 2026-04-17
- 南京工业大学毛宏理/顾忠伟教授、南京大学鼓楼医院孙凌云教授 AFM:负载干细胞磁性水凝胶逆转肝纤维化 2026-04-03
- 港大徐立之团队 ACS Nano:可光热融合的强韧磁性水凝胶 2023-05-07
- 西安交大张晓慧团队 ACS Nano:基于超软生物相容性磁性水凝胶的应变传感器及其在无线无源生物力学监测的应用 2022-12-11
