日前,美国达特茅斯学院柯晨峰课题组与日本东京大学伊藤耕三(Kohzo Ito)团队利用动力学协同捕获的分子设计,针对性引导聚假轮烷水凝胶的动力学组装,得到一系列可用于3D打印的亚稳态材料。该研究实现了以环糊精的聚(假)轮烷材料在微观-介观-宏观的跨多尺度下的精确调控。
研究成果以“Kinetic trapping of 3D-printable cyclodextrin-based poly(pseudo)rotaxane networks”为题,于北京时间6月29日晚23时发表在Chem上。
亚稳态材料是通过动力学合成得到的产物。由于其拥有比热力学稳态产物更高的能量,亚稳态材料往往展现出其热力学产物无法媲美的优异性能。然而,目前大多数合成亚稳态材料的手段是通过快速的物理条件的变换来进行动力学控制,从而制备和分离亚稳态材料。典型的方法诸如材料的快速冷却,超高压合成等等。相比之下,通过化学合成的方法来引导材料合成动力学控制能提供更好的选择性,从而更好地按需捕获亚稳态的产物。虽然近年来研究人员通过调控非共价相互作用在溶液中实现动力学产物的控制,但是将溶液相的动力学产物进行有效捕获并对其进行多个尺度下精确组装,是一项极具挑战的课题。
该合作团队研究的对象是大环分子α-环糊精与聚乙二醇(PEG)形成的聚假轮烷和聚轮烷结构。在低聚乙二醇(分子量低于6000)和环糊精的自组装过程中,环糊精穿入聚乙二醇并在热力学控制下形成聚假轮烷。这些聚假轮烷是高结晶性材料,它们在形成后会在水溶液中沉淀出来。因此,无论对环糊精或者聚乙二醇的浓度以及计量比进行变化都不会改变产物的化学组成。从分子角度分析,聚假轮烷的形成和沉淀主要分为穿环/滑动以及结晶两个过程。在低聚乙二醇和环糊精的溶液中,多个环糊精可以快速穿入聚乙二醇并滑动,形成聚假轮烷。多个聚假轮烷聚集起来,慢慢形成结晶体而沉淀。如果能够减慢聚假轮烷的形成并加速其结晶过程,来改变聚假轮烷形成的决速步,就可以实现聚假轮烷的合成动力学控制。
聚假轮烷晶体或水凝胶的形成可分为两个步骤,分别为穿环/滑动过程和结晶过程。相较于结晶过程,穿环过程一般具有更低的能量势垒。因而在结晶前,位于高分子轴上的环糊精能有更长的时间弛豫至其热力学稳态,由此生成的聚假轮烷沉淀具有更高的结晶性,很难捕获无定形的动力学产物。穿环/滑动过程和结晶过程能量势垒的高度不对等导致化学反应更倾向于热力学路径,若想获得动力学产物,必须恰当地调节这两个过程的能量关系。研究人员通过化学合成的手段,在聚合物轴上修饰能提高穿环过程能量势垒的化学基团(以金刚烷和降冰片烯为例),不仅提高了穿环/滑动过程的能量势垒,亦降低了结晶过程的能量势垒,实现了两个反应过程的能量匹配,提出协同动力学控制的理念,从而使捕获聚假轮烷的亚稳态产物成为可能。

图1:A.聚假轮烷热力学及其动力学反应路径能量关系图。两个反应过程能量势垒的不匹配引导了高晶态沉淀的热力学产物的生成;B.本工作提出的协同动力学反应路径,通过减少两个反应过程的能量差异,构筑二者的能量耦合体,实现具备多种网络结构的水凝胶的亚稳态产物的动态捕获。
研究人员通过一系列动力学实验对组装过程进行实时追踪,证实了在聚合物轴上的一端修饰上金刚烷(α-环糊精将无法通过此端)或降冰片烯(α-环糊精通过的速率将减缓)后,穿环/滑动的动力学显著减慢。结晶理论推导获得的模型进一步证明了其结晶过程能量壁垒显著降低。两者结合,证实了其分子设计的合理性。通过升温-退火实验,研究人员成功将动力学产物转化为热力学产物,验证了亚稳态产物的存在。
另外,在此研究过程中,研究人员意外发现此前在领域内被广泛采纳的α-环糊精-聚乙二醇聚假轮烷的晶体模型不足以解释他们观测到的聚假轮烷分子间“错误配对”现象。因此,他们结合所获得的高质量晶体,对其结构进行解析,提出了全新的堆积模型,纠正了对α-环糊精-聚乙二醇聚假轮烷晶体结构长达20多年的错误认识,为未来对于这类聚假轮烷材料的研究提供了更准确的结构信息。
通过改变初始反应条件(如温度、反应浓度、反应计量比等)实现不同反应路径的引导,研究人员成功分离了一系列的亚稳态结构,并选择性地设计、制备了一系列水凝胶动力学产物。利用扫描电子显微镜、小角及广角X射线散射等手段对其进行结构表征,证实了此方法可以在介观水平上有效控制聚假轮烷分子间三维堆积。宏观水平上,不同介观结构的水凝胶具有不同的流变性质,若对其进行相应的控制,即可以实现这一水凝胶的3D打印。
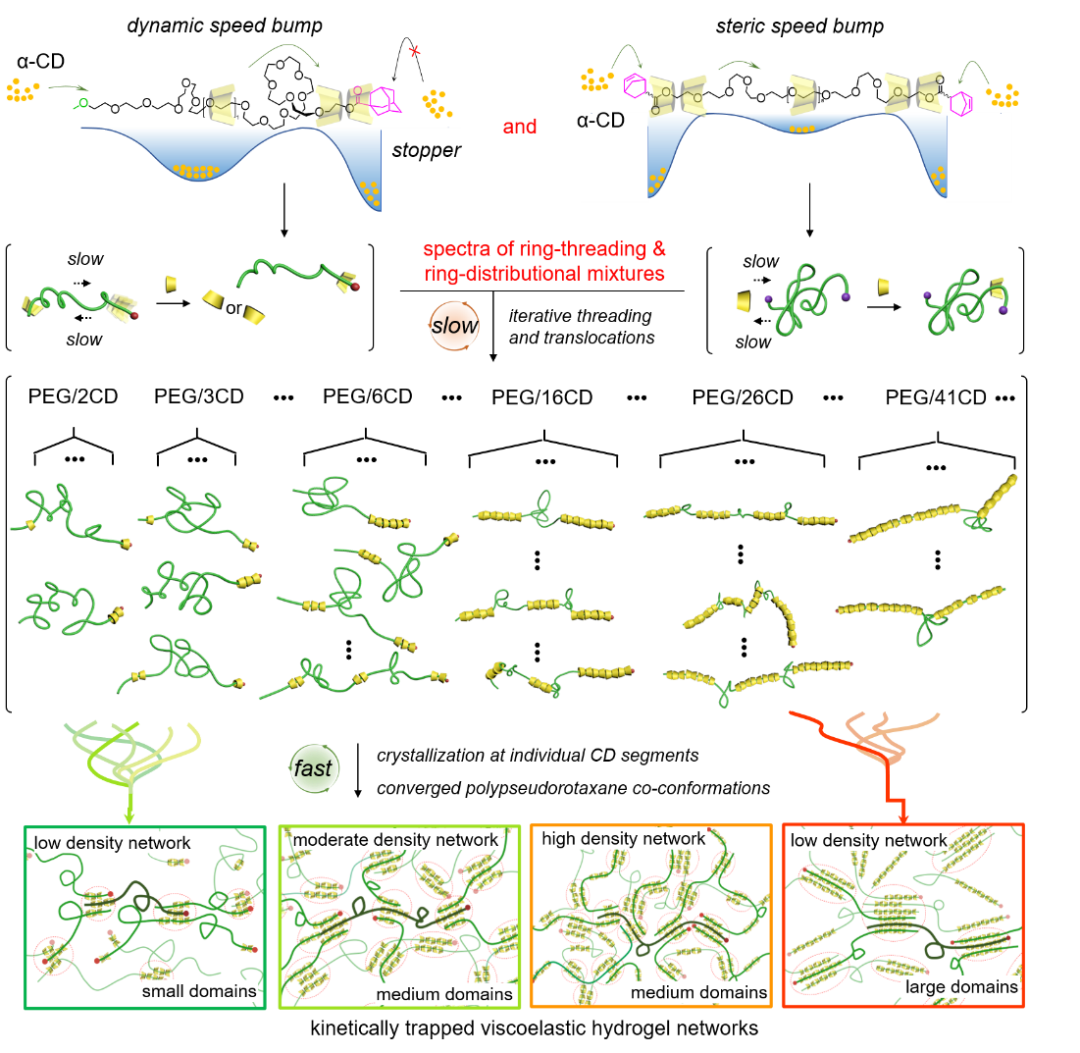
图2:动态捕获具有不同物理交联密度的亚稳态聚假轮烷网络。通过在聚合物一端上修饰金刚烷(环不可从此端通过)或在两端修饰降冰片烯(穿环速率减慢)基团,改变其穿环/滑动与结晶过程的能量关系,引导具有不同结构聚假轮烷的形成,最终通过结晶沉淀的方式选择性地动态捕获不同交联密度的亚稳态产物。
最终,基于对聚假轮烷材料动力学控制的认识,研究人员设计了同款具有相同聚假轮烷结构的打印墨水。通过高温打印,研究人员捕获了由较少环组装而成、具有疏松网络的聚假轮烷水凝胶;通过常温打印捕获由较多环组装而成、具有致密网络的聚假轮烷水凝胶。打印材料的空间分布可通过3D打印精确控制,并通过共价交联的方式“锁”住所捕获的亚稳态网络,控制所制得器件的各向异性。实验表明,通过这种方式所制备的一系列水凝胶器件能对环境湿度进行响应,其展现的形状变化与设计高度一致。

图3:通过变温打印所制得的一系列能对环境湿度产生响应而改变其自身形状的水凝胶器件。其形变模型与设计高度一致。
该论文的通讯作者柯晨峰告诉记者,这项研究不仅从基础研究的角度为分子机器的未来设计提供了新思路,制备出的亚稳态材料还对现有的直写型3D打印加工技术进行了革新,实现了仅用单一的墨水就能实现材料各向异性编码的创新想法。“我们希望我们的研究,不仅能推动对非平衡态材料设计的基础研究,还能以此为基石,通过化学设计的手段来解决现有材料科学和工程技术设计的难题,为其他领域创造出更多的机会。”柯晨峰说。
最后,研究人员认为,该工作的提出通过化学合成的手段,在分子水平上控制聚假轮烷的亚稳态,在介观水平上引导其结晶,定向、有效地将其分子结构信息放大到宏观的材料的理化性质。最终通过3D打印对其宏观结构信息进行进一步的编码,从而实现其组装器件宏观运动状态的精确控制。在未来的工作中,他们希望通过进一步对聚合物轴以及调控穿环/滑动速率基团的化学修饰,拓宽其亚稳态产物结构及网络的多样性。研究人员还对此进行展望:通过这个新方法,他们未来能实现更复杂的3D打印等工程学设计,以进一步构建基于亚稳态材料的软体机器人。
本项目是由美国达特茅斯学院柯晨峰团队与日本东京大学伊藤耕三团队合作完成。论文的四位共同第一作者分别是达特茅斯化学系博士生林倩明,汤淼,博士后李龙玉以及东京大学上沼駿太郎。
论文信息:https://doi.org/10.1016/j.chempr.2021.06.004
- 中国科大李家文教授团队 ACS Nano:3D打印源自单组分前驱体树脂的超高强度、超高韧性微纳SiOC陶瓷 2026-07-09
- 西工大黄维团队官操教授 AM:数字化制备三维液态金属水凝胶 2026-05-28
- 中国科大/伍伦贡大学 AFM 封面:基于面投影光固化技术的仿生梯度抗冲击结构材料 2026-04-17
- 福州大学吕晓林 Nat. Commun.:编织网络构建机械稳健、环境稳定的智能水凝胶 2026-08-01
- 四川大学王云兵/胡成团队 AM:多肽工程化水凝胶用于修复缺血脑卒中后的组织损伤 2026-07-31
- 东北大学田野团队 AFM:液态金属基共晶水凝胶应变传感器实现超低滞后的人机交互与高精度手语识别 2026-07-27
