1月29日,哈尔滨工业大学与美国德克萨斯大学达拉斯分校、江苏大学、韩国汉阳大学、澳大利亚卧龙岗大学等单位合作,首次发现通过聚电解质功能化的策略,可实现人工肌肉智能材料的“双极”(Bipolar)驱动转变为“单极”(Unipolar)驱动,同时发现了人工肌肉随电容降低,驱动性能增强的反常现象(Scan Rate Enhanced Stroke, SRES),这一重要突破解决了人工肌肉驱动性能的电容依赖性问题,为后续设计具有无毒、低驱动电压的高性能驱动器提供新的理论基础。研究成果以“单极冲程、电渗泵碳纳米管纱线肌肉”(Unipolar-Stroke, Electroosmotic-Pump Carbon Nanotube Yarn Muscles)为题,在线发表于著名学术期刊《科学》(Science)上,哈尔滨工业大学为共同通讯作者和共同第一作者单位,其中冷劲松教授为共同通讯作者(江苏大学丁建宁、哈尔滨工业大学冷劲松、美国德克萨斯大学达拉斯分校Ray H. Baughman),其博士毕业生楚合涛为共同第一作者(楚合涛、胡兴好、王锺、穆九科)。2014至2016年,楚合涛在德克萨斯大学达拉斯分校进行博士生联合培养,自2014年起,冷劲松教授课题组与德克萨斯大学达拉斯分校Ray H. Baughman教授课题组开始该项工作研究,并取得了关键性突破。
目前,新材料正由轻质、多功能化向智能化方向发展。智能材料(Smart Materials)是指一类可以在外界激励下做出主动响应的新材料,具有自驱动、自监测、自修复等多种功能,在人工智能、智能制造、生物医疗、机器人等领域具有广泛的应用前景。聚合物纤维与碳纳米管纱线人工肌肉是一种典型的智能材料,主要通过热、电化学两种方式实现驱动。由热力学定律可知,热驱动受到卡诺循环效率的限制,从而影响了其应用潜力。相比而言,电化学驱动克服了卡诺循环效率限制的问题,能量转换效率更高,具有更广阔的应用前景。
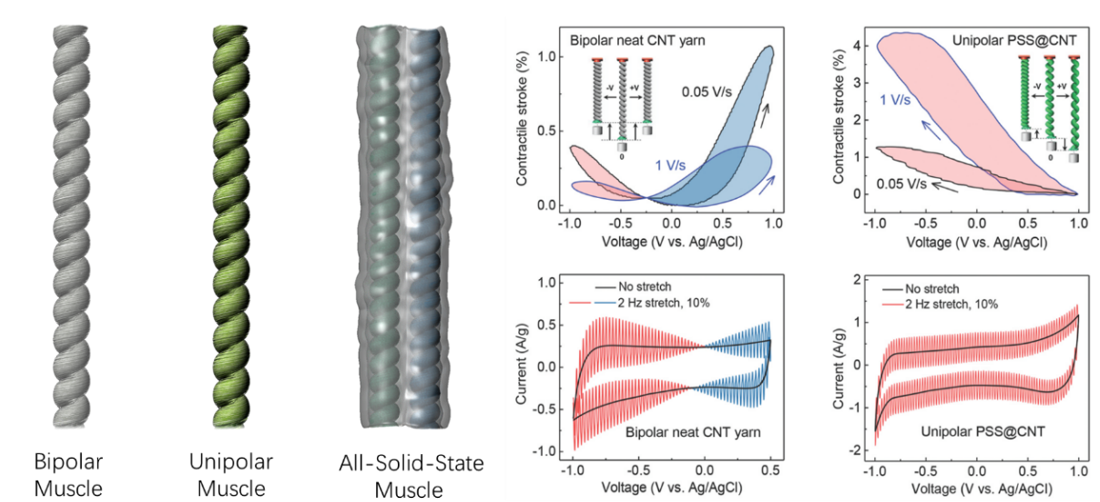
传统的电化学碳纳米管纱线人工肌肉(以下称:人工肌肉)存在以下局限性:(1)阴阳离子的嵌入、嵌出过程使得驱动应变与扫描电压之间呈现出“双极”效应,这意味着在电化学窗口内,纤维尺寸不是单调性变化,反向离子的嵌入、嵌出抵消了驱动应变,从而降低了人工肌肉的驱动性能;(2)人工肌肉的性能完全依赖于工作电极的电容特性,即随着扫描速率的增加,性能急剧降低。因此,传统的人工肌肉只能产生单向驱动,而且需在极低的扫描速率下工作。
针对以上问题,本研究通过聚电解质(零点电位移动试剂)功能化的策略,改变人工肌肉的零点电位:(1)实现了单一离子嵌入、嵌出的“单极”效应,解决了“双极”效应反向离子的嵌入、嵌出引起的性能降低问题,提高了做功效率与能量密度等性能;(2)人工肌肉随扫描速率增加,驱动性能增加,实现了SRES效应,解决了传统人工肌肉驱动性能的电容依赖性问题。进一步研究发现,SRES效应是因水合离子在高扫描速率或脉冲频率下可带动周围的水分子,从而增大了离子的有效尺寸,提高人工肌肉性能。
相比于传统人工肌肉,该人工肌肉具有无毒、驱动频率高(高达10 Hz)、驱动电压低(1 V)、高比能量(0.73~3.5 J/g),高驱动应变(3.85~18.6 %)以及高能量密度(高达8.17 W/g)等特性,在空间展开结构、仿生扑翼飞行器、可变形飞行器、水下机器人、柔性机器人、可穿戴外骨骼、医疗机器人等领域具有巨大的应用潜力。
人工肌肉类型以及“单极”、“双极”驱动特征对比
在杜善义院士、韩杰才院士的带领下,哈尔滨工业大学复合材料与结构研究所于20世纪90年代初在国内较早地确立了智能材料与结构的研究方向。在“崇德广业,穷理致用”发展理念的指导下,冷劲松教授课题组长期从事智能材料结构力学及应用研究,主要研究方向包括形状记忆聚合物及其复合材料结构、人工肌肉、多功能纳米复合材料结构、空间可展开结构、可变形飞行器、柔性机器人、4D打印技术及生物医疗器件、结构健康监测、振动主动控制等。
文章链接:https://science.sciencemag.org/content/371/6528/494
- 东华大学张青红教授等 AFM:基于高强导电同轴MXene纤维的多响应人工肌肉 2026-06-15
- 华南理工刘伟峰、广东工大邱学青 AFM:木质素构筑动态液晶双网络 - 打造高性能光热驱动人工肌肉 2026-03-27
- 武汉纺大夏治刚/南开刘遵峰/中国药大周湘 Matter:扭转自振荡人工肌肉 2026-02-08
