随着5G时代的到来, 物联网也逐渐的走进了人们的日常生活当中。人机交互界面,作为物联网的重要组成部分,也引起了学术和工业界的充分关注。传统的人机界面是由通过在人身体上装配坚硬且笨重的机械部件来操控机器完成作业。然而,部分患有重症肌无力的患者无法佩戴传统的人机界面来完成一系列的操作。为了解决这一问题,最近英国曼彻斯特大学刘旭庆博士团队利用无线通讯技术来串联轻便的可穿戴手套和机械手臂,成功的实现了柔性人机界面的突破。
集成可穿戴电子设备的智能人机界面对于促进物联网至关重要。双包覆的弹性纱线由于具有良好的机械性能 (超高的拉伸率)可以被视为完美的传感器基底。此项工作创造性的引入了姜黄素分子附着在弹性纱线的外包围尼龙层上来具有高活性的催化分子,为随后无电沉积的金属颗粒提供了良好的平台(图一)。由于弹性纱线的内芯仍然处于未覆盖金属涂层的原因,用这种方法所得的导电纱线同时具有高电导率(0.2 Ω/cm)和超轻的(1.5 mg/cm)的特性,是一种理想的可拉伸传感器材料。
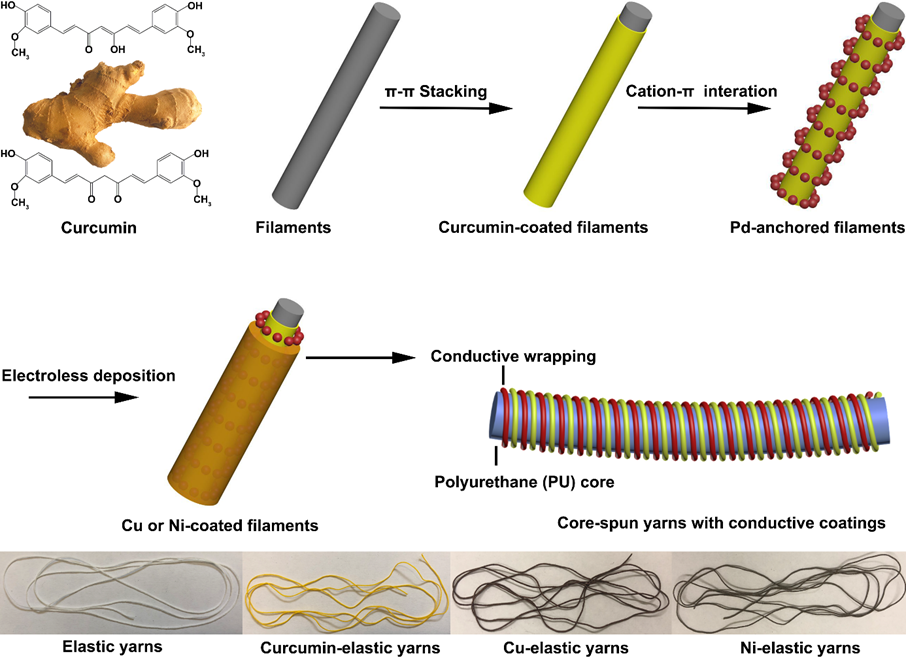
图一:导电弹性纱线的制作流程和实物照片。
通过对单根纱线的力学性能和电学性能测试,他们发现了各向同性沉积的结构纱线可以承受较高的单轴伸长率(>> 1100%),并且在50%应变下经过5000次连续拉伸-释放循环后仍保持低电阻率。除了螺旋加载结构带来的高灵活性外,还可以在外力作用下使用金属涂层导电层来实现精确的应变传感功能。更重要的是在力学分析的基础上,他们发现了应变感应响应的大小取决于结构变量,并且与实验结果吻合良好,展示了界面增强纱线可以作为可穿戴人机界面的潜力(图二)。
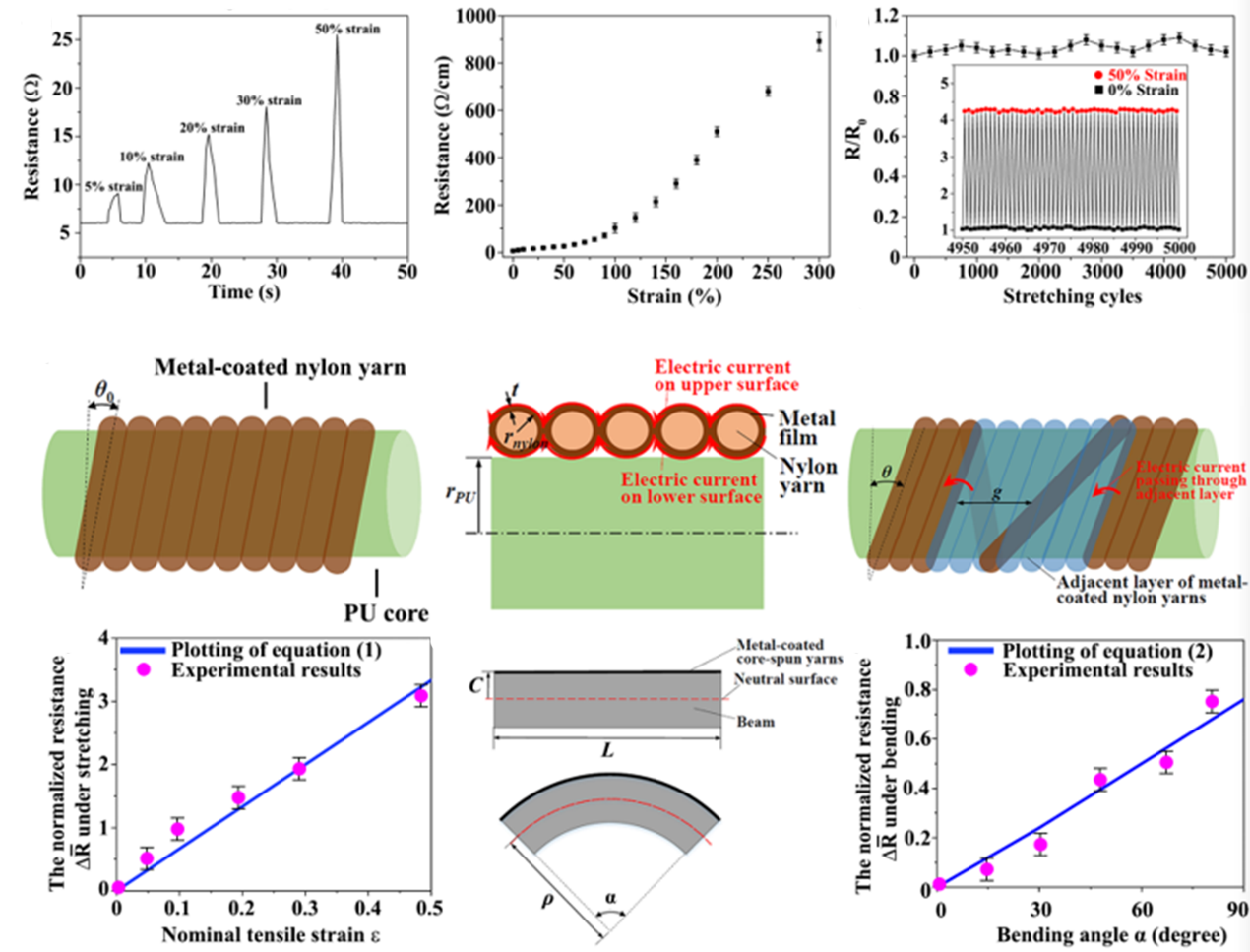
图二:导电弹性纤维的力学性能和电学性能的测试以及理论模型。
基于以上讨论导电弹性纤维的出色电学和力学的应变基础上,他们利用ECOFLEX将所制得的导电纤维传感器材料黏附在棉手套的内侧并利用电路控制系进行信号的发射和机械手臂的收集来完成人机界面的功能。单根内置传感器的重量为0.1克,整个智能手套的重量仅为8.5克。基于纱线的传感器感知到人的手指的弯曲/松开运动时,由于附着/拉伸的纱线被拉伸/释放,因此产生了定量脉冲。在接收电路中,所有五个数字电阻值均由无线通信模块接收,然后将这些数据转换为五个数字伺服角度信号。最后,五个数字到模拟转换模块将数字伺服信号转换为针对不同机械手手指的模拟伺服信号。因此,机械手根据各个模拟角度输入将其指定的手指移动到确定的位置,从而使机械手准确地反映了操作员的实际手势。利用同样的原理,这套智能可穿戴手套也可以用来控制灯泡的颜色(图三)。

图三:智能手套系统的搭建和在物联网中的应用。
相关工作发表在 Advanced Science (Ultraelastic Yarns from Curcumin‐Assisted ELD toward Wearable Human–Machine Interface Textiles)。论文第一作者是祝创,现为曼彻斯特大学博士四年级学生,第二作者为美国华盛顿大学的Ruohao Li,共同通讯作者为来自英国诺桑比亚大学的Dr. Ben Bin Xu和英国曼彻斯特大学的刘旭庆博士。
英国曼彻斯特大学有着悠久的纺织学科历史,是纺织学科的发源地。曼彻斯特大学刘旭庆博士课题组近几年致力于传统高分子纤维的表面分子设计,创新地研发了多种新型功能性面料和可穿戴设备,发表了如Nano Energy, 2020, 104926, ACS Nano 2020, 14, 7, 8191–8201, ACS Nano 2020, 14, 1, 559–567, Nano Lett. 2019, 19, 9, 6592–6599, Small 2019, 15, 1902440等系列研究工作。课题组还开展纺织行业污水处理,废旧织物的可回收利用等研究领域。其课题组的一些研究成果被The Economist,Nursing Times广泛报道,并和全球范围的产业界展开了深入的合作。
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/advs.202002009
- 厦门大学白华课题组 Matter:液态金属有机高内相乳液用于同轴3D打印弹性导电纤维 2025-11-07
- 东华大学熊佳庆课题组 Nat. Commun.: 温度适应性组分动态协同弹性导电纤维 2025-07-28
- 东华大学武培怡/孙胜童团队《Adv. Mater.》:应变电阻不敏感的离子导电纤维 2024-04-03
- 哈工大(深圳)何思斯团队 AM:高性能全聚合物水系准固态纤维电池 - 为透气可穿戴设备提供可靠能源 2026-06-05
- 中山大学付俊教授团队 AFM 综述:超薄可穿戴柔性电子器件及其智能健康监测应用研究进展 2026-05-30
- 武汉大学吴伟教授团队 AFM:用于下一代自适应可穿戴设备的全印刷温度-压力双模传感电子织物 2026-04-22
- 华南农大杨卓鸿、阿尔伯塔大学曾宏波 AFM:单宁酸改性纤维素纳米纤维增强型可聚合共晶凝胶 - 用于高性能可拉伸应变传感器 2026-07-30
