水凝胶驱动器作为一种智能软材料,能够将外部刺激转化为可控的机械变形,在智能机器人、生物医学等领域具有潜在的应用前景。温度是一种易于控制的重要刺激源,因此温度敏感性水凝胶驱动器一直是该领域的研究热点。目前温敏性水凝胶驱动器的响应性能提高主要基于两种策略:一种是构建各向异性结构(多为双层结构),用于提高驱动器的响应程度;另一种是减小凝胶尺寸或引入多孔结构以提高驱动器的响应速率。近年来温敏性水凝胶驱动器领域取得了较大进展,但仍然存在一些亟待解决的问题:(1)凝胶机械性能不佳,使应用范围受限;(2)由于回复往往受溶胀过程决定,而响应主要受温度影响,导致凝胶驱动器回复速度远远落后于响应速度(响应与回复时间比t响应/回复=0.02~0.5);(3)现有的温敏性凝胶驱动器通常是基于高温下凝胶失水收缩而产生形变,失水后的凝胶在水中再次吸水溶胀后才能回复到初始状态,因此其使用过程往往受限在水环境中。
受自然界天然高强材料与智能材料中梯度结构的启发,四川大学徐世美教授研究小组基于锂藻土(Laponite)的带电胶体性质以及交联作用,利用电场诱导Laponite梯度分布和N-异丙基丙烯酰胺(NIPAM)原位自由基聚合制备了具有连续梯度结构的纳米复合温敏性水凝胶驱动器PNIPAM/Laponite,该驱动器具有良好的力学性能和快速的弯曲响应性能。此外还表现出有趣的水促响应行为,即在一定范围内提高水含量,可大大提高响应速度和变形程度(Macromol. Rapid Commun. 2018, 1700863)。然而在该结构凝胶中,由于回复过程依然基于凝胶再溶胀吸水原理,因此导致回复速度较慢且仍需在水环境中进行。
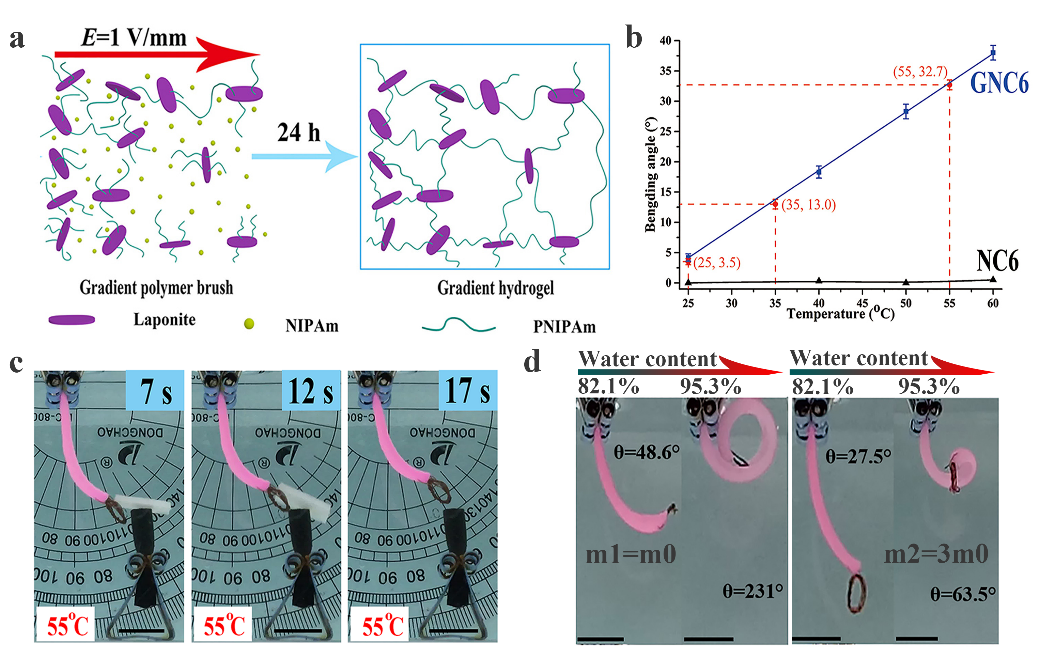
图1. (a)梯度水凝胶驱动器的制备示意图,(b)梯度水凝胶执行器(GNC6)和非梯度水凝胶(NC6)最大弯曲角度(θm) 与温度的关系,(c)50°C下,GN6弯曲过程中推翻硅胶片仍达到理论θm。(d)50°C下,不同含水量GN6悬挂不同质量的铜环后,最大弯曲角度的光学照片。
近日,在前期工作基础之上,徐世美教授研究小组通过向纳米复合梯度水凝胶驱动器PNIPAM/Laponite中引入亲水性单体丙烯酸羟乙酯(HEA)制备了长程连续的仿生梯度结构纳米复合水凝胶驱动器,通过调节丙烯酸羟乙酯与N-异丙基丙烯酰胺的比例来调控凝胶的亲疏水性,使得凝胶在高温产生相转变的同时并不发生体积收缩,从而成功实现了驱动器在高温下(50°C)快速弯曲(响应速度为21 s),同时在空气中快速回复(回复速度为29 s,t响应/回复=0.72)。该驱动器不仅克服了传统凝胶驱动器回复速度远落后于响应速度的缺陷,而且避免了回复过程需要有水存在的限制。实验进一步发现,当外界温度(50°C)大于凝胶相转变温度时,凝胶虽然没有发生失水收缩,但水在凝胶内外存在一个动态平衡,凝胶中自由水与结合水的比例发生了变化。当温度变化时,由于水的动态变化导致梯度凝胶中聚合物不同程度的卷曲或舒展,从而产生弯曲形变。

图2.(a)冷冻干燥后的仿生梯度水凝胶驱动器SEM图,(b)局部放大的SEM图,(c)GN24E1分别50°C水中弯曲响应和25°C空气中的可逆回复; (d)GN24E1在50℃去离子水中放置2 min后尺寸变化的光学照片。 (e)GN24E1分别在25℃和50℃的液体石蜡中弯曲。(f)在25°C和50°C下,仿生梯度水凝胶驱动器水传递的动态平衡机制示意图。
近日,该研究成果以“Rapid Recovery Hydrogel Actuators in Air with Bionic Large-Ranged Gradient Structure”为题,在线发表于ACS Applied Materials & Interfaces(DOI: 10.1021/acsami.8b13235)。
- 长春工大刘鑫、张钦课题组 Angew:一种兼具高机械强度与高锌离子迁移率的可回收超分子水凝胶电解质用于稳定锌负极 2026-07-13
- 浙江大学赵骞教授、浙江省肿瘤医院张宇华团队 Adv. Mater.:在可编程的自发变形水凝胶方面取得进展 2026-07-12
- 天工大张松楠 AFM 综述:水凝胶为光伏板“退烧” - 开启水-能协同热管理新路径 2026-07-10
- 宁波大学赵传壮/蒙特利尔大学朱晓夏 MRC: UCST聚合物设计与应用的协同策略 2023-08-14
- 宁波大学赵传壮和医科院医工所张明明 Macromolecules: UCST型温敏性AIE聚合物构建荧光变色系统 2023-06-07
- 中国农科院资划所杨相东课题组《Mater. Today Chem.》:成功开发了一种温敏型智能控释肥料 2022-11-27
- 浙江大学赵玥绮团队 AFM: 仿生梯度结构水凝胶助力骨软骨修复 2025-10-15
